




 Zitieren
ZitierenMit Freilaufdioden an de Motoren sollten sich die Störungen in Grenzen halten, aber elegant ist was anders.

 Werbung
Werbung


Ich benutze als Motortreiber diese Schaltung hier :
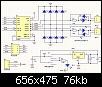
Ist es möglich , mittels 7805-Regler IC die 5V Spannung für den µC + L298, gleich aus der Motorenspannung abzuleiten, oder kann der Treiberchip L298 davon Schaden nehmen ?
Es ist genug Regelbereich vorhanden, um Belastungen der Motorspannung von der µC Spannung fernzuhalten, also stabil die 5V bereitzustellen.
Kann mir da wer helfen ??
Gruss und Dank
Gerhard
Arduinos, STK-500(AVR), EasyPIC-40, PICKIT 3 & MPLABX-IDE , Linux Mint

Mit Freilaufdioden an de Motoren sollten sich die Störungen in Grenzen halten, aber elegant ist was anders.
Grüße
Thomas
Genau das ist ja unten rechts im Schaltbild angegeben, die Vcc (Vs) wird mit einem 7805 zur stabilisierten 5V Vss. Oder verstehe ich die Frage nicht richtig?Ist es möglich , mittels 7805-Regler IC die 5V Spannung für den µC + L298, gleich aus der Motorenspannung abzuleiten ... ?
Der 7805 braucht wenigstens 7V Eingangsspannung. Wenn die Spannungsversorgung das kann, hätte ich kein Problem damit.
Hallo Gerhard,
hänge nach dem 5V Spannungsregler noch einen Elko mit ca. 1000 µF rein. Wenn Du den Motor schaltest, dann bricht Dir die Spannung am µC ein.
MfG
Hans

Hi Gerhard,
leider verstehe ich die chinesische Anschriften auf von dir geposteter Zeichnung noch nicht, deshalb nur eine Skizze von weiter in dem Thread praktisch ausprobierter Schaltung: https://www.roboternetz.de/community...l=1#post571452 .
MfG (Mit feinem Grübeln) Wir unterstützen dich bei deinen Projekten, aber wir entwickeln sie nicht für dich. (radbruch) "Irgendwas" geht "irgendwie" immer...(Rabenauge) Machs - und berichte.(oberallgeier) Man weißt wie, aber nie warum. Gut zu wissen, was man nicht weiß. Zuerst messen, danach fragen. Was heute geht, wurde gestern gebastelt. http://www.youtube.com/watch?v=qOAnVO3y2u8 Danke!
Ich speise 9 Volt ein, ist ja auch nur zum Testen, nur habe ich noch so keine Erfahrungen mit dem L298, Theorie und Praxis sind manchmal 2 verschiedene Schuhe.
ich könnte den Chip selber nicht ersetzen, darum die Vorsichtsfrage ob man 2 getrennte Grundspannungen benötigt. Ich habe mir mal einige der Treiberbausteine( lt. dieser Schaltung) aus Honkong schicken lassen..
Danke Euch erst mal...
Gerhard
P.S. @Thomas : Was wäre denn Deiner Meinung nach "Elegant" ?
Geändert von oderlachs (14.09.2013 um 17:46 Uhr)
Arduinos, STK-500(AVR), EasyPIC-40, PICKIT 3 & MPLABX-IDE , Linux Mint

Also auf Eleganz kann ich bei meinen Realisierungen (wohl auch???) nicht hinweisen - was solls, auch ein Rennsportwagen ist nicht elegant, vielmehr total übermotorisiert und ansonsten recht funktional.Zitat von oderlachs

Zur Frage: ich habe bei meinem MiniD0 die fünf Akkuzellen AAA für den Motor genommen und direkt an den Motorcontroller L293D geleitet als Motorspannung. Dran hängt dann ein SEPIC-Regler für den Controller und den Motortreiber. Das Akkupaket geht also direkt an den L293D als Motortreiber (die IC-Spannung wird aus den geregelten 5V genommen), da ist die Thematik dann wohl dieselbe (oder versteh ich das total falsch?). Der SEPIC-Regler ist auf 5,02V eingestellt, der regelt auf- oder abwärts - je nach Spannung der Akkubatterie. Und der mickrige Elko vor dem Controller ist vermutlich weniger wichtig als der kleine KerKo.
Bei meinem Dottie habe ich an die sechs Akkuzellen AA zwei getrennte 7805 angeschlossen; einen für controller und Sensorik und einen für den Motor und den ziemlich störenden SHARP-Entfernungsmesser. Auch da sind nur 220µF-Elkos.
Ciao sagt der JoeamBerg
Genau so hatte ich es vor, nur eben mit anderen Spannungswert für die Motore. Haupversorgung durch 12v Akku dann daran ein 7,5V Regler für Motore(7,2V) und ein 5V Regler für den µC sammt Zubehör (US-Sensor, Line Sensor usw..).
Gerhard
Arduinos, STK-500(AVR), EasyPIC-40, PICKIT 3 & MPLABX-IDE , Linux Mint
Hi Gerhard, ähhhh - nix PWM für die Motoren?? Ich hab schon kräftige 3V-Motoren (Akkuschrauber) mit 12V versorgt! Die 12V gingen (aber) bis zum Motortreiber, der hat das in hübschen Hackepeter - ähhh - Hackstrom zerteilt, sodass bei entsprechend geringer Oberkante des PWM-duty-cycle (ED, Pulsanteil der PWM) der Motor gut versorgt war und prächtig und unbeschadet gefahren ist. Denn der Motortreiber verliert wie fast alle elektrischen Treiberbausteine auch etliches an Spannung - da sind Deine 0,3V wohl etwas zu wenig tief ins Verlustgeschäft geguckt. Manche Treiber (den L298 kenne ich ÜBER HAUPT NICHT) fressen da schon mal ein oder zwei Völtchen; ich hätte jedenfalls die Vermutung, dass nach dem L298 nur noch etwas über fünf Volt aus der Brückenschaltung kommen.
Probiers doch mal mit den unverfälschten 12-Akku-Volt direkt an den Motortreiber. Die ausgegebenen Pulse müssten am Oskar gut zu sehen sein - der Motor wird schon nicht sooo schnell Schaden nehmen.
Jetzt sag blos, dass Du Dich demnächst beim Chinesischkurs für Elektroniker bei der Volkshochschule anmeldest *gg*
Ciao sagt der JoeamBerg
Natürlich, aber in diesem Leben schaffe ich's leider fast sicher nicht mehr. ^^
MfG (Mit feinem Grübeln) Wir unterstützen dich bei deinen Projekten, aber wir entwickeln sie nicht für dich. (radbruch) "Irgendwas" geht "irgendwie" immer...(Rabenauge) Machs - und berichte.(oberallgeier) Man weißt wie, aber nie warum. Gut zu wissen, was man nicht weiß. Zuerst messen, danach fragen. Was heute geht, wurde gestern gebastelt. http://www.youtube.com/watch?v=qOAnVO3y2u8 Danke!
 Berechtigungen
Berechtigungen


Lesezeichen