
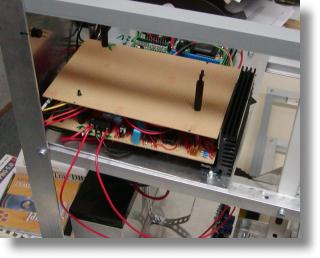
Nachdem Motoren und Steuerung perfekt funktioniert, braucht man eine weitere Platine wo man Steckkontakte, Porterweiterungen oder Relais für Sensoren, Liftmotorsteuerung und Widerstände für Spannungsüberwachung unterbringt. Sehr viel Platz spart man, wenn man die Platinen Huckepack übereinander anordnet. Besonders einfach gelingt dies wenn man kombinierbare Abstandsbolzen verschiedener Länge benutzt. Solche Teile bekommt man im Elektronik-Versandhandel z.B. Conrad, Reichelt usw. Ich kann nur empfehlen auf solche kleinen Hilfsmittel zurückzugreifen, das erspart einen später eine Menge Zeit wenn wieder Platinen wegen einer Änderung demontiert oder wieder montiert werden müssen.
Wenn ihr mehrere Platinen übereinander stapeln wollt, empfiehlt es sich auch eine Platine als Muster für die Bohrlöcher zu nutzen. Motortreiber die besonders heiß werden, sollten natürlich mit einem großen Kühlkörper versehen werden. Ich habe Spannungsregler und Motorregler an einem Kühlkörper befestigt, welchen ich zudem noch an die Alu-Platte geschraubt habe.
 Nachdem
ich festgestellt hatte, dass mein Motor langsam doch etwas schwach wurde um das
steigende Gewicht meines Roboters sicher zu bewegen, suchte ich nach Lösungen.
Mir wurde schnell klar das ich nicht den idealen Schrittmotor hatte. Der Innenwiederstand
war mit über 30 Ohm einfach zu hoch. Zudem sorgte die Induktivätät dafür das
schon bei geringer Drehzahl nur noch ein Bruchteil des Nennstromes floss. Abhilfe
konnte nur eine wesentlich höhere Spannung schaffen. Je höher die Spannung, je
besser und schneller kann die Stromregelung höhere Ströme garantieren. Eine
Tatsache die man sich bei Schrittmotoren merken sollte.
Nachdem
ich festgestellt hatte, dass mein Motor langsam doch etwas schwach wurde um das
steigende Gewicht meines Roboters sicher zu bewegen, suchte ich nach Lösungen.
Mir wurde schnell klar das ich nicht den idealen Schrittmotor hatte. Der Innenwiederstand
war mit über 30 Ohm einfach zu hoch. Zudem sorgte die Induktivätät dafür das
schon bei geringer Drehzahl nur noch ein Bruchteil des Nennstromes floss. Abhilfe
konnte nur eine wesentlich höhere Spannung schaffen. Je höher die Spannung, je
besser und schneller kann die Stromregelung höhere Ströme garantieren. Eine
Tatsache die man sich bei Schrittmotoren merken sollte.
Eine Lösung wären somit zwei Batterien
mit 12 V in Serie. Bei gleicher Kapazität wäre dies allerdings sehr schwer geworden.
Zwei Batterien mit der halben Kapazität wären aber auch keine gute Lösung da
der Staubsauger schnell die Energie verbraucht hätte. Somit entschied ich mich
zu einer simplen Spannungsverdopplerschaltung (hatte ich zudem noch in der Bastelkiste).
Aus 12 V wurden somit ca. 21 V generiert. Auch wenn diese im Betrieb auf ca.
18 V abfiel, konnte ich damit recht gute Ergebnisse erzielen. Der Motor war
wie zu erwarten deutlich stärker! Da ich aber 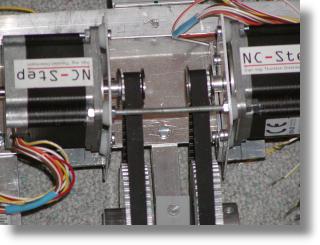 eine
etwas höhere Geschwindigkeit erreichen wollte, entschloss ich mich dann zu einem
wesentlich stärkerem Motor mit fast 1 Nm. Solche Motoren werden oft bei Eigenbau
Drehmaschinen eingesetzt und sind leider auch nicht ganz billig. Ich entschied
mich für einen Motor mit 8 Anschlüssen, da dieser vielfältige Anschlußmöglichkeiten
erlaubt. So können die Spulen wahlweise parallel oder in Serie geschaltet werden.
Je nach Schaltung besitzt der Motor eine unterschiedliche Nennspannung und Nennstrom.
eine
etwas höhere Geschwindigkeit erreichen wollte, entschloss ich mich dann zu einem
wesentlich stärkerem Motor mit fast 1 Nm. Solche Motoren werden oft bei Eigenbau
Drehmaschinen eingesetzt und sind leider auch nicht ganz billig. Ich entschied
mich für einen Motor mit 8 Anschlüssen, da dieser vielfältige Anschlußmöglichkeiten
erlaubt. So können die Spulen wahlweise parallel oder in Serie geschaltet werden.
Je nach Schaltung besitzt der Motor eine unterschiedliche Nennspannung und Nennstrom.
Gute Ergebnisse erzielte ich mit der Serienschaltung. Mit einem Strangstrom von ca. 1 A benötigte mein Roboter somit ca. 4 A bei einer Geradeausfahrt. Das war auf Dauer dann doch etwas viel für meinen Spannungsverdoppler - er rauchte dahin ;-) Als Alternative nutzte ich dann die Parallelschaltung der Spulen, denn dadurch benötigte der Motor nur noch ca. 4V Nennspannung um seinen Nennstrom zu erreichen. Um jedoch etwas Energie zu sparen regelte ich die Stromstärke nur auf ca. 50% des vorgeschriebenen Nennstromes.
Auch damit kam der Roboter recht gut zurecht und alles funktionierte bestens.
Nachdem der Antrieb geregelt ist,
kann man sich an die Sensorik für den Roboter machen. Für einen Staubsaugerroboter
ist es nun mal sehr wichtig das er nicht überall aneckt, von daher waren Infrarot-Sensoren
mit dem IC S471F angesagt
(siehe Seite Sensoren). Um die Reichweite dieses Schaltkreises zu erhöhen
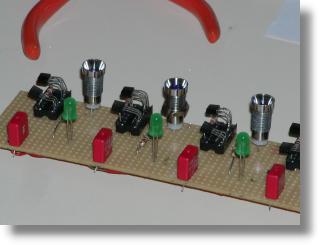
wollte ich einige Versuche mit einem Transitorverstärker machen. Da ich jedoch
kein Steckbrett hatte und auch nicht wild die doch etwas teureren Bauteile verlöten
wollte, hab ich kurzerhand einige IC-Fassungen als Steckbrett mißbraucht. Wie
auf dem Bild ersichtlich, habe ich einfach Transistor, Basiswiderstand und IS471F
entsprechend gebogen und in eine Fassung gesteckt. Auf diese Weise konnte ich
bequem verschiedene Transistoren mit verschiedenen  Basiswiderständen
austesten. Auch konnte ich so die optimale Biegung des IS471F austesten. Da
ich gehört hatte, dass sich die IS471 auch gegenseitig beeinflussen sollen,
entschloss
ich mich alle meine Sensoren in dieser Art mit IC-Fassung aufzubauen.
Basiswiderständen
austesten. Auch konnte ich so die optimale Biegung des IS471F austesten. Da
ich gehört hatte, dass sich die IS471 auch gegenseitig beeinflussen sollen,
entschloss
ich mich alle meine Sensoren in dieser Art mit IC-Fassung aufzubauen.
Auf diese Weise konnte ich später
schnell prüfen ob alle Sensoren auf der gleichen Frequenz senden oder ob es
hier Unterschiede gab, wie es in einigen Foren zu lesen war. Nachdem ich 4 Sensoren
nebeneinander angebracht hatte, versuchte ich diese durch umstecken zu optimieren
-  also
die gegenseitige Beeinflussung zu minimieren. In gewissem Rahmen gelang dies
auch, allerdings würde ich sagen, dass alle Sensoren auf der gleichen Frequenz
senden und es nur geringe zufällige Toleranzen gibt. Deutliche Unterschiede
waren nicht zu erkennen. Eine gewisse gegenseitige Beeinflussung nahm ich also
bei meinem Projekt in Kauf. Es störte auch nicht weiter wenn oft gleich zwei
Sensoen reagierten. Viel wichtiger war mir das auf der gesamten Breite auch
jedes schmale Hinderniss erkannt wird. Durch die Anordnung nebeneinander gelang
dies sehr gut, praktisch der komplette Bereich wurde durch Überscheidung der
Sensoren erfasst. In gewissem Sinne hat hier die gegenseitige Beeinflussung
sogar Vorteile gebracht.
also
die gegenseitige Beeinflussung zu minimieren. In gewissem Rahmen gelang dies
auch, allerdings würde ich sagen, dass alle Sensoren auf der gleichen Frequenz
senden und es nur geringe zufällige Toleranzen gibt. Deutliche Unterschiede
waren nicht zu erkennen. Eine gewisse gegenseitige Beeinflussung nahm ich also
bei meinem Projekt in Kauf. Es störte auch nicht weiter wenn oft gleich zwei
Sensoen reagierten. Viel wichtiger war mir das auf der gesamten Breite auch
jedes schmale Hinderniss erkannt wird. Durch die Anordnung nebeneinander gelang
dies sehr gut, praktisch der komplette Bereich wurde durch Überscheidung der
Sensoren erfasst. In gewissem Sinne hat hier die gegenseitige Beeinflussung
sogar Vorteile gebracht.
Hätte man IR-LED und IC 471 übereinander angeordnet, wie es oft gemacht wird, dann würden deutliche Lücken in der Erfassung von Hindernissen entstehen. Diese hätte man dann nur durch wesentlich mehr Sensoren ausgleichen können. Wesentlich mehr Sensoren hätten dann wieder die gleiche gegenseitige Beeinflussung bewirkt, von daher scheint mir meine Anordung als wesentlich sinnvoller.
Um später besser beobachten zu können wie die einzelnen Sensoren in der Praxis reagieren, habe ich zu jedem Sensor auch noch eine LED gepackt. Diese leuchtet im Falle eines Hindernisses auf! I
Insgesamt habe ich 9 Sensoren auf der vorderen Front, eine an jeder Ecke und jeweils 2 auf jeder Seite angeordnet. Zusätzlich wurden noch zwei Sharp-Sensoren zum Messen von Entfernungen auf der Frontseite eingesetzt.
![]()
<zurück> Gehe
zu Seite <0> <1> <2> <3> <4> <5> <6>
<7> <8> <weiter>
Roboter-Tutorial
- Thema: "Ich
will einen Roboter bauen - nur wie?"