








hi,
Prima!!
kannst das Ding ja einrichten und uns dann Bescheid geben. Habe keine Ahnung von solchen Dingen.
mit weihnachtlichem Gruß
Klingon77
PS: Soll ich mein Teil, falls Du es hosten möchtest dann nochmal uploaden oder ziehst Du es von Rapid-Share und nimmst meine Kurzbeschreibung aus dem Thread?
PPS:
Anbei noch die Zahnriemendurchführung und die Drehachse (Lenkung) für den Zahnriemenantrieb.
http://rapidshare.com/files/8645085/...h-Lagerung.rar
Zur besseren Orientierung welches Teil ich meine, nochmal ein Bild.
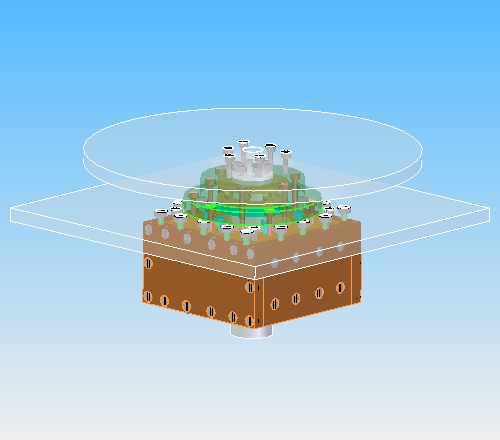
Der Zahnriemenantrieb kommt nun auf die obere (runde) Platte. Die untere (quadratische) Platte ist Teil des Robotergehäuses.
Der Zahnriemen (Teilung 2,5 - Breite 6mm) läuft also vom Zahnriemenantrieb durch die Hülse und unten um eine weitere Zahnscheibe, die mit der Radachse verbunden ist.
------------------------------------------------------------------------------------
Wenn ich es fertigbringe, möchte ich die runde obere Platte, auf welcher der Antrieb montiert ist, umfangsseitig als Zahnriemenscheibe fräsen. Dann kann ich auf die untere Grundplatte (quadratisch) einen Stellmotor fixieren, der das Rad mit Antrieb um 360 Grad drehen kann.
So, der Rest muß noch konstruiert werden und dann mal alles mit SOLID EDGE zusammenbauen.

 Zitieren
Zitieren

Lesezeichen