Richtig. Ich glaube das ist nur am schnellsten zu zeichnen gewesen. Eher praktikabel sind 3 Alustangen oder -streifen auf beiden Seiten der Räder.Zitat:
Zitat von recycle

Druckbare Version
Richtig. Ich glaube das ist nur am schnellsten zu zeichnen gewesen. Eher praktikabel sind 3 Alustangen oder -streifen auf beiden Seiten der Räder.Zitat:
Zitat von recycle
hi,
ich wollte unten zwei Rollen haben, um das Gewicht des Stator-Ringes auf die Lauffläche von zwei Rollen und zwei Lagerungen zu verteilen.Zitat:
Zitat von ähM_Key
Man hält sich, mit beiden Rollen unten auch die Tiefste Stelle frei, um dort den/die Akku (´s) anzubringen. Der Platz ist dann nicht mit einer Rolle, Lagerung und Antrieb belegt. Niedriger Schwerpunkt.
Da hast Du wahrscheinlich recht.Zitat:
Zitat von Murdoc_mm
Der Gedanke bei zwei angetriebenen Rädern ist der, daß sich die Abnutzung der Antriebsräder, welche durch die Runde Lauffläche nur eine "Punktauflage" haben verringern sollte.
Das geht aber bestimmt auch mit einem angetriebenen Rad.
Die Abnutzung kann man verringern, indem man in der Motorsteuerung durch PWM eine "Rampe" in der Beschleunigung und beim Abbremsen "fährt".
Da hast Du sicherlich Recht!Zitat:
Zitat von recycle
Das Gewicht könnte man noch durch große Bohrungen im Bereich oberhalb der Antriebsplattform (muß ich noch zeichnen) reduzieren.
Das ist eine Gute Idee!
Dies würde ich aber erst ganz am Ende der Fertigung machen. Zuerst müssen alle Teile angebaut sein, sonst könnte es passieren, daß ich keinen Platz mehr habe um notwendige Schrauben/Gewinde anzubringen.
Da wir noch kein Rad haben, sind die Maße auch noch nicht fest.
Akku´s und Motoren können auf der Plattform gleichmäßig links und rechts verteilt werden.
Wenn die Verteilung nicht zu 100% symetrisch ist, dürfte dies auch kein Beinbruch sein. Es sollte in der Grundkonfiguration mit Hilfe der Position des verschiebbaren Ausgleichgewichtes kompensierbar sein.
Dies wird dann einfach ein wenig mehr nach einer Richtung ausglenkt.
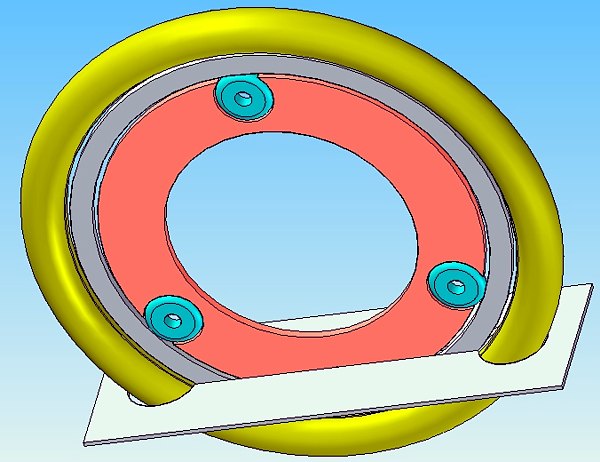
anbei noch eine Skizze mit einer gedachten Grundplatte. Diese wird an den Stator-Ring geschraubt.
Die Platte ist noch ohne Versteifungen oder Befestigungen ausgeführt.
Hat jemand eine Idee, welche Rollen man zur Seitenführung des Stator-Ringes am äußeren Alu-Ring verwenden könnte?
Sie sollen:
* Im Durchmesser nicht so groß sein.
* Kugelgelagert sein oder eine diesbezügliche Lagerung zulassen.
* Mit Gummi oder einem nicht zu harten, verschleißfesten Kunststoff belegt sein.
* Weiterhin sollten sie, um den Verschleiß, der ja durch die Durchmesserzunahme des äußeren Alu-Ringes von innen nach außen sicher nicht gering ist, ebenfalls eine gewölbte Oberfläche aufweisen (Punktauflage).
Gruß, Klingon77
@ähM_Key
Totaler Quatsch würde ich nicht sagen.Zitat:
Wenn sich das Teil ausbalancieren soll (durch irgendwelche bewegten Gewichte oder Gyros), ist es aber glaube gut, wenn das ganze wie ein inverses Pendel, d.h. mit dem Schwerpunkt so weit oben wie möglich aufgebaut ist.
EDIT: Totaler Quatsch (es ist doch schon spät )...wie soll man denn dann vorwärts kommen...
Vorwärtskommen müsste mit dem Gewicht oben eigentlich auch noch drin sein. Dann wäre es ja sowas ähnliches wie ein Balancierender Roboter mit sehr grossen Rädern. (als das was du vermutlich auch mit inverses Pendel meinst)
Um Vorwärts zu kommen und die Balance in Fahrtrichtung zu halten ist man auf die Massenträgheit angewiesen. Dafür ist's günstig, wenn der Schwerpunkt möglichst weit weg von der Drehachse liegt.
Der Abstand nach unten ist natürlich immer begrenzt, daher baut man beim balancierenden Roboter in die Höhe.
Wenn das Innenleben beim Monowheel komplett innerhalb des Rades bleiben soll ist hier natürlich nach unten genauso viel Platz wie nach unten.
Wenn man nach unten baut nimmt man auf jeden Fall schon mal den Vorteil mit, dass das Ding mindestens in Fahrtrichtung eine stabile Lage (stabiles Gleichgewicht kennt).
Wenn die nicht rotierende Masse im Verhältnis zur Masse des Rades gross genug ist, kann man sich dadurch eigentlich auch das Ausbalancieren in Fahrtrichtung sparen.
Wenn man möglichst hohe Beschleunigung erreichen will und der Innenteil nicht "pendeln" soll, wird man allerdings doch in Fahrtrichtung balancieren müssen.
Im Vergleich zum balancierenden Roboter oder inversen Pendel kommt beim Monowheel aber noch dazu, dass es auch quer zur Fahrtrichtung kippen kann.
Da liegt das Zentrum der Drehung (des Kippens) dann an dem Punkt, wo das Rad den Boden berührt. Da dürfte es dann wie beim inversen Pendel wieder vorteilhaft sein, wenn der Schwerpunkt möglichst weit oben liegt.
Der Vorteil besteht allerdings darin, dass das Ding wegen der Massenträgkeit langsamer kippt, je weiter der Schwerpunkt oben ist.
Beim inversen Pendel heisst das, man hat mehr Zeit gegenzusteuern.
Das Gegensteuern durch Bewegung in Kipprichtung wie man es beim inversen Pendel macht scheidet hier allerdings aus.
Einfach umkippen lassen ist aber wohl auch nicht die Lösung ;-)
Wie die Lösung dafür letztendlich aussehen soll ist ja scheinbar noch nicht entschieden.
Wenn es Stützräder werden, ist es günstiger wenn der Schwerpunkt unten ist. Wenn die Kippneigung durch Gewichtsverlagerung ausbalanciert werden soll, könnte ein hoher Schwerpunkt wieder vorteilhafter sein.
Ich glaube um das alles so richtig abzuschätzen müssen erst noch mehr Details her.
Daher ist Klingons Vorgehensweise einfach mal was zum drüber Nachdenken vorzulegen schon der beste Weg.
Hallo Monowheeler,
als erstes einmal: Klasse Idee.
Als Beitrag folgender Vorschlag:
Warum nicht doch ein komplettes Rad mit Speichen benutzen?
Wenn man auch noch die Gabel (natürlich ohne Lenker) dranläßt, hätte man eine 'Kabelbrücke' von der einen zur anderen Seite.
Gewichte, also Akku, Motoren, Elektronik usw., werden dann rechts und links an der Achse/Gabel aufgehängt und 'baumeln' einfach so nach unten.
Um das Ganze auf Fahrt zu bringen, müßte über ein an der Achse befestigtes Zahnrad per Kette und unten 'baumelnden' Motor angetrieben werden.
Mit dem Lenken des Ganzen, könnte es eventuell gehen, wenn oben auf der Gabel ein Gewicht nach rechts oder links verschoben wird.
Das Konstrukt würde erst einmal den Innenzahnkranz überflüßig machen.
Auf alle Fälle weiterhin gute Ideen und viel Erfolg.
Gruß Sternthaler
Muss die Grundplatte vor und hinter dem Rad überstehen?Zitat:
anbei noch eine Skizze mit einer gedachten Grundplatte. Diese wird an den Stator-Ring geschraubt.
Die Platte ist noch ohne Versteifungen oder Befestigungen ausgeführt.
Praktisch stört das sicherlich nicht. Ich finde aber optisch nimmt es das einem Mono-Wheel irgendwie einiges an Witz.
Ich weiss nicht wie ich richtig ausdrücken soll, irgendwie nimmt es dem Mono-Wheel den "Einfach nur ein Rad"-Effekt, wenn es in der Seitenansicht niicht mehr völlig rund ist.
@recycle: Hm, stimmt, man kann ja auch dynamisch losfahren...immernoch spät ;)
Schade, dass ich die Videos nicht mehr finde...ich glaube u.A. die Russen haben so einen Robo schon vor vielen Jahren mal gebaut.
hi recycle,
nun verstehe ich das mit dem hohen Schwerpunkt ein wenig besser :mrgreen:
Angenommen der Schwerpunkt würde oben liegen, dann müssten wir aber zwei Achsen ausbalncieren.
Einmal in/gegen die Fahrtrichtung
Einmal seitlich zur Fahrtrichtung
Um dem seitlichen Kippen entgegenzuwirken hätte man, bedingt durch den größeren Weg sicherlich mehr Zeit. Die Amplitude der Auslenkung des Ausgleichgewichtes müsste dann aber ebenfalls größer ausfallen - oder?
Ich glaube ein Pendeln des Innenteiles in/gegen die Fahrtrichtung ist nicht zu vermeiden und sollte auch weiter nicht schlimm sein.
Bei den "großen", bemannten Monowheels wird das auch in Kauf genommen.
Ist die Beschleunigung/Verzögerung allerdings zu groß, überschlägt sich das Innenteil. Die Richtige "Rampe" zum Beschleunigen/Abbremsen ist, denke ich, durch Versuche leicht zu ermitteln.
Stützräder sind in der Erprobungsphase ein Muß, später aber sollte es ohne gehen, bzw. sollten sie ab einer gewissen Geschwindigkeit eingefahren werden.
Ein zusätzliche, schnell drehende Masse sollte ebenfalls zur Stabilität, insbesondere bei geringen Geschwindigkeiten beitragen.
Den Stator-Ring habe ich (vorab) bewußt so gewählt. Man hat erstmal viel Platz zum "dranschrauben". Am Ende kann man sich dann, wie oben beschrieben um eine Gewichtseinsparung an den richtigen Stellen kümmern.
Gruß, Klingon77
Nachtrag:
Ist ja echt was los heut Nacht \:D/
Komme mit den Antworten gar nicht nach...
die Grundplatte muß vorne und hinten nicht überstehen. Zumindest nicht rechteckig.
Der innere Kranz sollte steif genug sein, um links und rechts zwei Platten anzubringen.
Ich habe sie nur so groß gehalten, damit ich erst mal alles draufbekomme was draufsoll.
Die entgültigen Maße richten sich dann nach dem An- Aufbau der restlichen Teile.
Geht natürlich.Zitat:
Zitat von Sternthaler
Der Schwerpunkt wäre dann aber wieder sehr weit oben und man müsste das Rad auch in / gegen die Fahrtrichtung ausbalncieren.
Gruß, Klingon77
Stimmt natürlich.Zitat:
Der Schwerpunkt wäre dann aber wieder sehr weit oben und man müsste das Rad auch in / gegen die Fahrtrichtung ausbalncieren.
Ein weiteres Riesenproblem dürfte es auch geben, wenn das 'baumelnde' Zeug an der Gabel einen Überschlag machen würde. Dann wäre es wohl aus mit einer Lenkung.
Und ausserdem, wie recycle gerade schreibt, geht dann ja auch der "Einfach nur ein Rad"-Effekt verloren.
OK, ich werde aber weiter mitlesen und mich über eure Ergebnisse freuen.
Gruß Sternthaler
Hallo,
an ein normales Rad habe ich auch schon gedacht.
Der "Coolnessfaktor" / Desgnfaktor leidet aber doch ein wenig.
Wenn hatte ich gedacht, das Rad ohne Gabel zu verwenden und einfach beidseitig Teile an die Nabe zu bauen.
z.B.:
1. Seite Antriebsmotor, Akku
2. Seite seitliche Gewichtsregelung / Gyro, Elektronik, (Akku)
Die Radnabe müsste dazu sinnvollerweise hohl sein.
Die Konstruktion würde sehr vereinfacht.
Das Design könnte ggf. leiden. Muss aber nicht zwingend.
Sigo
Ergänzung:
Wenn man beide Seiten-Lasten mit einem Antrieb versehen würde, sodass sie nicht starr mit der Nabe verbunden wären, könnte man sie gegeneinander verschränken und so wahrscheinlich die Lenkung auch durch den Impuls realsieren.
Die Idee mit dem Fahrrad reifen ist nicht schlecht finde ich, mein Vorschlag:
Externes Bild anzeigen
Wobei das Schwarze das Rad ist, das dunkel Blaue ein Rahmen (ganz dünn, nur damit die beiden arme nicht gegenseitig schwingen und damit eine Verbindung besteht), das Grüne der Motor, der mit einer Fahrradkette an der grauen Achse befestigt ist (müsste man wegen der Übersetzung gucken), und das gelbe ein Akku.
Zur seitlich Stabilität könnte man dann einfach die roten Platten hin und her bewegen z.B. in dem man an den hell blauen Punkten einen servo hat oder man hängt noch unter die Platten gewichte (Akkus), die man seitlich verschieben kann .
Hallo,
Stimme ich zu.Zitat:
Zitat von sigo
Also wenn ich nur nach dem Design entscheiden müsste würde ich sehr viel lieber eine Fahrrad-reifen/-felge ohne Speichen bevorzugen als eine mit Speichen und innerer Nabe.
Ohne Speichen kommen wir auch dem großen Mono Wheel Vorbild näher als mit Speichen.
Trotzdem Danke für eure Ideen. (Und noch ist ja nicht aller Tage abend. \:D/ )
Aber ich möchte doch gerne die Lösung ohne Speichen weiterverfolgen. :-b
Sehe ich auch so.Zitat:
Zitat von Klingon77
Ganz einfach gesagt hat der Schwerpunkt wenn er höher liegt einen größeren Hebel und damit muss das Ausgleichsgewicht/Steuergewicht auch eine größere Gegenkraft erzeugen (durch längeren Hebel oder mehr gewicht).
Ich glaube das Pendeln ist sogar notwendig oder?Zitat:
Zitat von Klingon77
Also im Stillstand ist der Schwerpunkt genau über (senkrecht) der Auflagefläche des Rades (sonst steht der Bot nicht still \:D/ ). Bewegt (Pendelt) sich das innenleben nach vorn oder hinten wird der Schwerpunkt verschoben (nach vorn oder hinten). Das bewirkt das der Schwerpunkt eben nicht mehr senkrecht über der auflagefläche ist und (wie recycle schon erwähnt hat) dann fällt der Bot nach vorn oder hinten (um). Nur das der Bot nach vorn oder hinten eben nicht "umfallen" kann sondern man eher von kullern (rollen) spricht.
Das das nicht passiert würde ich mit Sensoren abdecken wollen. Natürlich kann man auch noch eine max.-Beschleunigung/Verzögerung definieren (werd ich auch machen) aber ich würde versuchen per Sensor die PWM des Motors zu regeln um den Bot wenn gewünscht mit maximaler Beschleunigung/Verzögerung fahren zu können.Zitat:
Zitat von Klingon77
Gruß Murdoc_mm
@Klingon77
Anstatt die Amplitude grösser zu machen, könnte man auch das Ausgleichgewicht schwerer machen.Zitat:
Um dem seitlichen Kippen entgegenzuwirken hätte man, bedingt durch den größeren Weg sicherlich mehr Zeit. Die Amplitude der Auslenkung des Ausgleichgewichtes müsste dann aber ebenfalls größer ausfallen - oder?
Eigentlich sollte aber beides nicht erforderlich sein.
Mit der höheren Schwerpunkt und dem dadurch langsameren Kippen, möchte man ja eigentlich erreichen, dass man das Kippen schon früher ausgleichen kann, weil man dann gerade noch nicht soviel Ausgleichkraft (also Amplitude und Gewicht) braucht.
Das Problem an der ganzen Geschichte ist, dass man hier jede Menge Faktoren berücksichtigen muss, die sich alle gegenseitig beeinflussen.
Eine Regelung um dem Kippen entgegenzuwirken benötigt Zeit. Die hängt u.a. von den verwendeten Sensoren und der mechanischen Reaktionsgeschwindigkeit.
Durch einen höheren Schwerpunkt erreicht man ein langsameres kippen, braucht allerdings bei gleichen Kippwinkel entweder mehr Ausgleichgewicht oder mehr Amplitude. Ausgleichgewicht und Amplitude beinflussen amer wieder die mechanische Reaktionsgeschwindigkeit der Regelung.
Der Kippwinkel darf nicht zu gross werden, weil man ihn dann "kraftmässig" nicht mehr ausgleichen kann, er muss aber eine Mindestgrösse haben, damit die Sensoren ihn überhaupt erfassen können.
Ein hoher Schwerpunkt wirkt sich auf die Massenträgheit und damit auf die Kippgeschwindigkeit, aber auch auf die benötigte Kraft zum Gegensteuern aus.
Zu klein darf die Massenträgheit nicht sein, weil man die Regelung nicht beliebig schnell machen kann, beliebig gross kann man sie natürlich auch nicht machen.......
Ich würde sagen, dass ist ein Gleichungssystem mit lauter unbekannten und nicht lösbar.
Und das Kippen quer zur Fahrtrichtung ist ja nur ein kleiner Teil des ganzen Monowheel-Systems ;-)
Ich glaube das Beste ist, du planst erst mal weiter, bis das Ganze so aussieht wie es aussehen soll und alles dran ist was dran soll.
Dann kann man die ganzen Massen, Massenträgheiten usw. berechnen und versuchen die passenden Regelungen zu entwerfen.
Dann wird sich ja rausstellen, ob und wenn ja, was geändert werden muss und in welche Richtung man noch optimieren kann.
Das hätte bei der Hinderniserkennung den Vorteil, dass die Sensoren automatisch in verschiedenen Höhen nach Hindernissen scannen ;-)Zitat:
Ich glaube ein Pendeln des Innenteiles in/gegen die Fahrtrichtung ist nicht zu vermeiden und sollte auch weiter nicht schlimm sein.
Bei den "großen", bemannten Monowheels wird das auch in Kauf genommen.
Da sollte man dann aber aus Sicherheitsgründen ein Schutzgehäuse drum machen.Zitat:
Ein zusätzliche, schnell drehende Masse sollte ebenfalls zur Stabilität, insbesondere bei geringen Geschwindigkeiten beitragen.
Beri der "Schwungscheibe" wäre auch interessant, ob man die nicht für mehrere Zwecke verwenden kann:
a) Zur Richtungsstabilität und Kippstabilität
b) Wenn sie im Zentrum aufgehängt ist und entgegen der Fahrtrichtung dreht, würde sie dem Drehen des Stators entgegenwirken, d.h. man könnte bei der Beschleunigung mehr Moment aufbauen.
Ich weiss allerdings nicht, ob es nicht die Wirkung von a) aufhebt, wenn sich Rad und Schwungscheibe entgegengesetzt drehen.
c) Wenn man die Schwungscheibe quer zur Fahrtrichtung bewegbar macht, könnte man sie zum Ausgleich der Kippbewegung verwenden.
Die Schwungscheibe müsste hier eigentlich effektiver sein, als wenn man dafür zusätzlich ein einfaches bewegliches Gewicht verwendet. Hierfür wäre es allerdings günstiger, wenn die Scheibe oberhalb des Zentrums aufgehängt ist. Eventuell könnte das dann auch gleich die Lösung zur Lenkung sein. Wenn die Geschwindigkeit hoch genug ist, lenkt man Zweiräder ja auch dadurch, dass man sie kippt.
d) Wenn man die Scheibe wie in c beweglich macht, aber in Fahrtrichtung vor oder hinter dem Zentrum aufhängt, könnte sie eventuell auch verwendet werden um das Monowheel um die Kurve zu drücken.
Bei langsamer Fahrt könnte auch das die Lösung zur Lenkung sein.
Macht man bei Zweirädern bei langsamer Fahrt ja auch so (jedenfalls mit dem Vorderrad)
Überall gleichzeitig kann die Scheibe natürlich nicht sein, aber wenn man sie für mehr als nur a) einsetzen könnte, wär das ja schon ganz praktisch.
Fraglich ist allerdings, ob ich hier nicht einen Denkfehler drin habe.
Einerseit erscheint es mir logisch, dass man die Schwungscheibe durch Ihre Richtungsstabilität zum Lenken verwenden kann, indem Sie das Rad aus dem Geradeauslauf drückt.
Andrerseits erscheint es mir aber auch unlogisch, dass man sie zum Lenken einsetzen kann, weil die Schwungscheibe ja gerade nicht von der Richtung abweichen will.
Das Rad in eine andere Richtung drücken und dann loslassen sollte auf jeden Fall funktionieren, allerdings nur einmal ;-)
hi,
eine Schwungscheibe mit Schutzgehäuse wäre, so denke ich jedenfalls, von Vorteil.
Dabei dürfte es egal sein, ob die Achse der Schwungscheibe in der gleichen Richtung wie die Radachse oder um 90Grad versetzt angebracht ist.
Ich tendiere zu einer stehenden Schwungscheibe, weil:
a) diese von der Lagerung einfacher zu realisieren ist.
b) durch eine liegende Schwungscheibe durch den Übertrag von mech. Energie durch die Reibung in der Lagerung das Rad immer ein wenig in die drehrichtung der Schwungscheibe lenken würde.
Hat jemand schon eine Idee, welchen Gummi (oder welche Gummiräder) man für die Seitenführungsrollen des Starorringes verwenden kann?
So spontan fallen mir da die Reifen von "Lego-Autos" oder ähnlichem ein.
Felgen mit Kugellager könnte ich machen.
Es sollte halt ein nicht zu harter Gummi sein, der auch einiges an Laufzeit hinter sich bringt und auch noch in 3 Jahren nachgekauft werden kann, falls dies erforderlich ist.
Durchmesser so ca. 20-30mm
Roler-Blade´s Rollen gingen zwar, aber die sind von der Optik wohl etwas zu groß.
@recycle:
Was die Anbringung des Ausgleichgewichtes angeht:
bist Du also auch der Meinung, daß es einfacher zu steuern ist, wenn das Gewicht unten ist? Man spart sich die Reglung des Gewichtes in/gegen die Fahrtrichtung.
gruß, Klingon77
Um 90 Grad verstetzt zur Radachse ist so ungefähr die einzige Ausrichtung, für die ich mir persönlich gar kein Anwendungszweck einfällt.Zitat:
eine Schwungscheibe mit Schutzgehäuse wäre, so denke ich jedenfalls, von Vorteil.
Dabei dürfte es egal sein, ob die Achse der Schwungscheibe in der gleichen Richtung wie die Radachse oder um 90Grad versetzt angebracht ist.
Da fallen mir als erstes Modellbau-Reifen für den etwas "professionelleren" Bereich ein. Da gibt es Reifen in verschiedenen Härtegraden (Gummimischungen) die man normalerweise auch noch einige Jahre später nachkaufen kann.Zitat:
Es sollte halt ein nicht zu harter Gummi sein, der auch einiges an Laufzeit hinter sich bringt und auch noch in 3 Jahren nachgekauft werden kann, falls dies erforderlich ist.
Wenn ein passender Reifen gefunden ist, würde ich allerdings doch lieber gleich ein paar Reservereifen dazukaufen.
Im Verhältnis zu den Gesamtkosten dürften die Reifen nicht so sehr ins Gewicht fallen und wenn kurze Zeit später ausgerechnet die ausgewählten Reifen aus dem Programm genommen werden oder der Hersteller pleite geht wäre das ja schon recht ärgerlich.
Ich weiss nicht genau, was du in diesem Zusammenhang mit Ausgleichgewicht meinst.Zitat:
@recycle:
Was die Anbringung des Ausgleichgewichtes angeht:
bist Du also auch der Meinung, daß es einfacher zu steuern ist, wenn das Gewicht unten ist? Man spart sich die Reglung des Gewichtes in/gegen die Fahrtrichtung.
Falls du mit Ausgleichgewicht den Schwerpunkt der Stator-Masse meinst, wird die sich ohne Regelung immer unten einpendeln.
Da wäre es sicherlich vorteilhaft es freiwillig nach unten zu legen, damit nacher nich alles auf dem Kopf steht ;-)
Bei einem bewegliches Ausgleichgewicht mit dem die Kippbewegung quer zur Fahrtrichtung ausbalanciert werden soll, dürfte es u.a. auch darauf ankommen, wo die Kraft ansetzt mit der erst zur Seite bewegt wird.
Wenn das Rad z.B oben zur linken Seite wegkippt, kann man das nur ausgleichen, wenn man ein Ausgleichgewicht (Gegengewicht) nach rechts ausfährt.
Das Ausgleichgewicht ist aber träge, d.h. wenn die Kraft die es ausfährt oberhalb des Schwerpunkts, also oben am Rad ansetzt kippt man das Rad noch stärker.
D.h. die Kraft muss unten ansetzen, damit sie gegen die Reibung des Rades auf dem Boden arbeitet.
Was das Ausgleichgewicht selber betrifft, weiss ich nicht ob es Vorteile hat es nach oben zu verlegen.
Von der Konstruktion her dürfte es einfacher sein, es in der Nähe der Stelle zu befestigen wo auch die bewegende Kraft angleich und das ist unten.
hi,
ich habe mich betreffend der Gyro-Scheibe unklar ausgedrückt.
Ich meinte:
a) stehende Scheibe. Laufrichtung in Fahrtrichtung
b) liegende Scheibe
Mit dem Ausgleichgewicht habe ich mich wohl auch nicht ganz deutlich ausgedrückt.
Damit meine ich die Masse, welche quer zur Fahrtrichtung verschoben wird, um das Rad zu lenken und im Gleichgewicht zu halten.
Die hätte ich gerne an den tiefsten Punkt gelegt.
Als Gewicht würde sich eine Blei-Gel Batterie anbieten. Man hätte dann gleich zwei "Fliegen mit einer Klappe geschlagen".
Über die Lagerung des Gewichtes habe ich mir einige Gedanken gemacht.
Es soll ja leicht verschiebbar sein.
Linearführungen wären eine feine Sache, aber viel zu teuer.
Dann kam ich auf kugelgeführte Schubladen-Leisten.
Die sind leicht zu verbauen und kugelgelagert.
Im Moment mache ich mir gerade Gedanken um den Laufrollenspanner für die obere Rolle.
Wenn die Skizze fertig ist, gibt es ein neues Bild.
Nach den Modellbau-Reifen muß ich mal suchen. Das ist wohl keine schlechte Idee. Wenn man keine mit gewölbter Lauffläche bekommt, kann man sie ja immer noch leicht schräg anstellen.
Gruß, Klingon77
Das muss nicht an deinem Ausdruck liegen, vielleicht liegts auch an mir. So richtig verstehe ich jedenfalls immer noch nicht was gemeint ist.Zitat:
ich habe mich betreffend der Gyro-Scheibe unklar ausgedrückt.
Ich meinte:
a) stehende Scheibe. Laufrichtung in Fahrtrichtung
b) liegende Scheibe
Unter einer liegenden Scheibe stell ich mir eine Scheibe vor die parallel zum Boden dreht.
Die meinte ich ja im 2.Teil meiner vorherigen Antwort.Zitat:
Mit dem Ausgleichgewicht habe ich mich wohl auch nicht ganz deutlich ausgedrückt.
Damit meine ich die Masse, welche quer zur Fahrtrichtung verschoben wird, um das Rad zu lenken und im Gleichgewicht zu halten.
Die hätte ich gerne an den tiefsten Punkt gelegt.
Ich glaube die Kraft die diese Masse verschiebt muss auf jeden Fall am tiefsten Punkt ansetzen. Um die Konstruktion so einfach wie möglich zu halten würde ich dann auch die Masse selbst erst mal soweit wie möglich nach unten plazieren.
Klingt für mich erst mal gut.Zitat:
Dann kam ich auf kugelgeführte Schubladen-Leisten.
Die sind leicht zu verbauen und kugelgelagert.
Vielleicht lassen sich auch irgendwo passenende O-Ringe (oder wie auch immer man Gummiringe mit den passenden Ausmaßen bezeichnet) auftreiben.Zitat:
Nach den Modellbau-Reifen muß ich mal suchen. Das ist wohl keine schlechte Idee. Wenn man keine mit gewölbter Lauffläche bekommt, kann man sie ja immer noch leicht schräg anstellen.
Meinst du solche Reifen die auch RC-Cars haben? Sind die nicht viel zu groß und zu breit?Zitat:
Zitat von recycle
Was ist eine kugelgeführte Schubladen-Leiste?Zitat:
Zitat von Klingon77
Vielleicht per Gewinde und (Konter)Mutter die Laufrolle nach außen drücken.Zitat:
Zitat von Klingon77
1. meint er wahrscheinlich ^^ aber ich würde euch zu Modellflugzeugrädern raten, die sind kleiner und aus irgendwas widerständigem...
2. Ne stinknormale Schubladen-Teleskopleiste... du weißt schon... die Alu bzw. Stahlteile die du ausziehen kannst. Siehe Ikea ^^
Hallo alle zusammen,
Gute Idee!Zitat:
Zitat von Lunarman
Ah! Na sag das doch gleich. :cheesy:Zitat:
Zitat von Lunarman
Jetzt versteh ich auch was mit Lagerung des Gewichts gemeint ist. Aber ist das wirklich notwendig? Brauchen wir wirklich ein Steuergewicht/Ausgleichsgewicht das so schwer ist das man es noch zusätzlich lagern muss?
Ich dachte eigentlich an ein etwa 10 cm langes stückchen Alustreifen (vielleicht 2 cm breit) mit nem Gewicht an der einen Seite (2x4x4 cm Stahlblock) und den Servo an der anderen Seite anschrauben. Da würde ich voll auf den Servo vertrauen und nichts weiter lagern. Oder bin ich da zu optimistisch?
Ich bin eigentlich immer davon ausgegangen das das Steuergewicht nicht grade schwer sein muss. Bei niedrigen Geschwindigkeiten sollte ein kleines Gewicht auch völlig ausreichen aber bei hohen Geschwindigkeiten (wenn der Bot Stabiler ist) seh ich schon ein das man mehr Kraft haben muss. Allerdings muss/darf man bei hohen Geschwindigkeiten nicht so stark lenken --> kleines Gewicht würde reichen.
Aber was meint ihr:
Wie schwer sollte das Steuergewicht werden?
(Angaben nicht in gramm sondern eher in: leicht, schon schwer, riesig schwer,... da wir die Gesamtmasse des Bots noch nicht haben)
Hallo noch mal,
ich hab mal meine momentanen Vorstellungen von dem Bot in 3 Zeichnungen festgehalten. Ich gehe davon aus das eine Fahrradfelge und ein passender Mantel die Lauffläche abgeben.
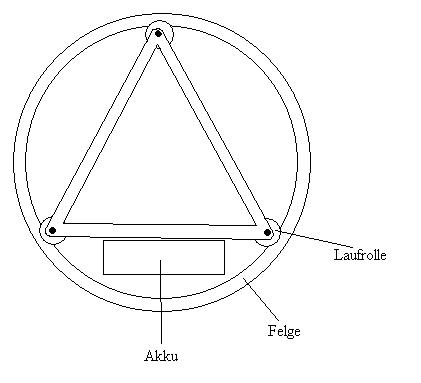
1. Seitenansicht des ganzen Bots (nur Felge gezeichnet, keinen Mantel)
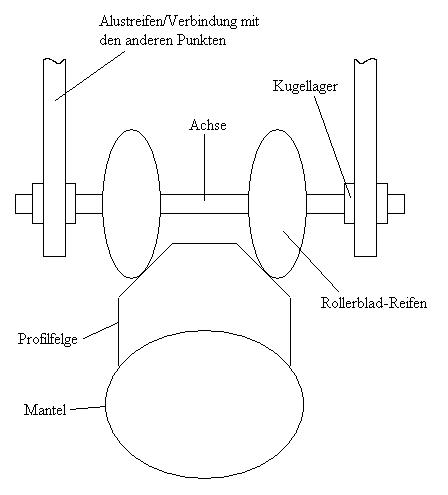
2. Ein schnitt durch den Reifen/Felge und die Anordnung/Lagerung der Rollen
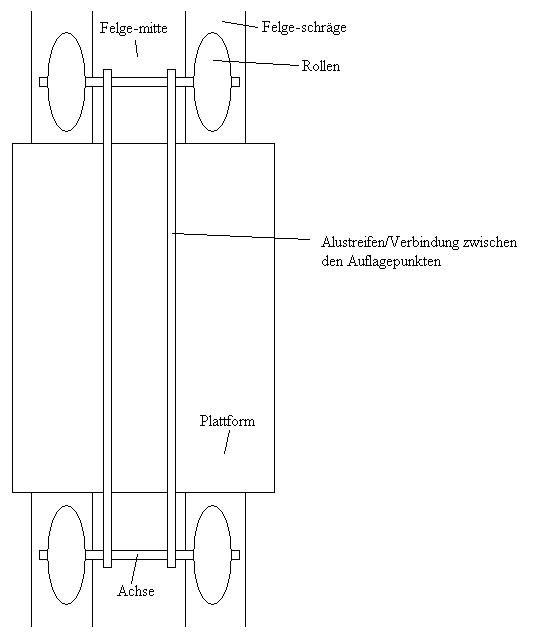
3. Ansicht der Grundplatte von oben
Zu 1.:
- die Rollen sollten im Winkel von 120 Grad verteilt werden (also gleichmäßig)
- die verbindung zwischen den Rollen sollte (nicht wie von mir gezeichnet aus Alustreifen) aus dicken (4mm) Aluprofilen sein da die Streifen knicken würden
- Klingon77 (er hats schon vorab gesehen) meint eigentlich bräuchte man bei dieser Konstruktion sogar keine Spannvorrichtung
- falls aber doch eine notwendig sein sollte könnte man auch ein Stück Aluprofil rausschneiden und durch ein Gewinde ersetzen und mit einer Mutter die Einstellung vornehmen (da reiche ich noch eine Zeichnung nach falls jemand nicht weiß was ich meine)
- den Akku kann man ganz einfach unter (also Hängend) die Plattform anbringen (--> das schwerste Teil ist ganz unten)
- die Verbindungen (die 3 Alustangen/-profile) müssen natürlich auf beiden seiten der Räder/des Bots angebracht werden
Zu 2.:
Ich glaube Recycle hatte das mal so irgendwo vorgeschlagen und mir gefällt das ganz gut. Man spart sich die Führungsschine und hat keine Probleme die Rollen schräg lagern zu müssen. Das Innenleben kann auch nicht herausfallen und den Bot einfacher zu bauen geht glaube ich nicht (ich lass mich aber gern vom gegenteil überzugen \:D/ ).
Zu 3.:
Soll einfach nur darstellen wie die Plattform aussehen könnte.
So, was haltet ihr von dieser Konstruktion? Wo seht ihr Probleme oder was geht noch einfacher/besser?
Gruß Marcus
So hier noch die Einstellmöglichkeit:
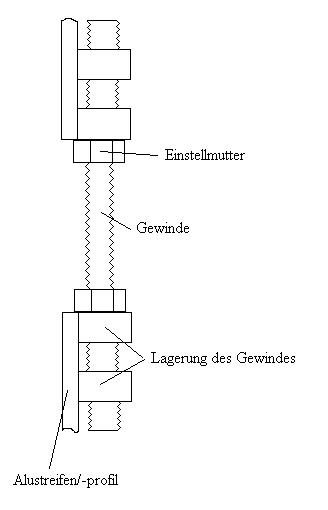
Wie gesagt man muss nur eine Alustrebe zerschneiden und das ding so einsetzen und man hat eine einfache Einstellmöglichkeit um den Druck mit dem die Rollen auf die Felge gedrückt werden zu regulieren. (muss auch beidseitig gemacht werden)
Gruß
Hallo, eigendlich wollte ich ja nur noch mitlesen.
Aber folgendes muss ich unbedingt loswerden:
Wow, Klasse Konstruktion
- kein Innenzahnkranz
- kein 2.ter Innenring, der auch noch genau passen muss
- leicht zu beschaffende Bauteile (sieht erst einmal danach aus)
Zum Profil:
Ich verlasse mich seit einigen Jahren auf Alu-U-Profile mit nur 2 mm Wandstärke. Meine 'tragenste' Konstruktion damit war eine Kamarahalterung für 2 * Spiegelreflex + jeweils 1000 mm Brenweite. In Summe ca. 3 kg. Da hat sich noch nichts verbogen auf einer Länge von ca. 50 cm.
Hi, die Konstruktion gefällt mir sehr gut.
Rollerbladerollen haben ja bereits Lagersitze im Rad und auch meist schon die Lager. Diese würde ich bei den nicht angetriebenen Rollen nutzen.
Dann braucht die Achse der oberen Rollen nicht drehbar zu sein, und du kannst sie an den Enden mit Gewinde versehen. Dann einfach die Bohrung in den Profilstangen als Langloch ausführen (wie beim Fahrrad) und die Achse entsprechend verschieben und festschrauben. Du kannst ggf. noch 2 Schauben vorsehen, die gegen die Achse drücken, bzw. dran ziehen. Sowas hatten früher die Fahrräder auch (hinten). Evtl. kann man auch starke Federn gegen die Achse drücken lassen, dann ist immer alles definiert gespannt.
Die angetriebe(n) Rolle(n) würde ich so ausführen, wie du gezeichnet hast.
Auf diese Weise musst du das schöne Dreieck nicht zersägen. Du brauchst ja eh nur ein paar mm Hub.
Sigo.
hi alle,Zitat:
Zitat von sigo
eure Ideen sind wirklich toll und viel einfacher zu realisieren, als mein Vorschlag.
Manchmal bin ich halt auch "Sicherheitsfanatiker" - gerade, wenn ich was für andere baue möchte ich nicht, daß sich was verbiegt oder zerbricht! Es soll also im wahrsten Sinn des Wortes "dauerhaft" sein.
Der Innenkranz hätte die Felge zusätzlich stabilisiert.
Mit einer Doppelsteg-Felge könnte es aber auch gehen.
Das Problem mit den Kuglellagern in den Roler-Blade Rollen ist, daß sie durch die Schräge Fläche, auf der sie laufen seitlich stark belastet werden.
Die Lager haben dadurch unter Umständen eine hohe seitliche Belastung, für die sie auf Dauer nicht ausgelegt sind.
Es würde sich also anbieten, alle drei Achsen als Starrachsen auszulegen.
Die seitlich auftretenden Kräfte würden dann von der Welle aufgenommen.
Die Idee mit der Spannvorrichtung ist wirklich gut!
Als Basismaterial würde ich gerne 4mm Flach-Alu verwenden und gegebenenfalls mit Stegen versteifen.
Die Versteifungen könnte man dort einarbeiten, wo sie nicht hindern und gebraucht werden. Zur Not könnte man bei Bedarf auch mal ein M3 (M2) Gewinde mit einer halbwegs guten Festigkeit in 4mm Alu reinschneiden um z.B: ein Kabel, Sensoren, Platinen oder andere leichte Sachen zu befestigen.
Bei zwei ineinanderliegenden U-Schinen sind die Möglichkeiten begrenzt, weil man eine geschlossene Form hat.
Für heute genug - darf nun wieder zur "Arbeit".
Bis morgen, Klingon77
Hei Murdoc_mm, hallo alle,
nur der Vollständigkeit halber: kennt ihr die ballbot-Thematik?
Spektrum der Wissenschaft, September 2007, S 74, Rollen mit Ballbots, von Ralph Hollis von der Carnegie Mellon University in Pittsburgh (es geht um einen dynamically stable single-wheeled mobile robot with inverse mouseball drive)
sowie ein Bild (siehe URL) des Lauf"werks" dieses Roboters
http://www.wissenschaft-online.de/artikel/897965
Also ich WEISS, dass dies ein völlig anderes Konzept ist. Allerdings denke ich auch, dass dies von der Mechanik UND von der Kinematik bzw. von der Stabilität und Stabilisierbarkeit recht praktisch wäre. Wie gesagt, es ist nur der Vollständigkeit halber von mir erwähnt, ich will Dich, Murdoc_mm, nicht auf einen anderen Pfad bringen.
Im Übrigen kenne ich solche Ein-Räder wie eingangs von Murdoc_mm erwähnt aus utopischen Groschenheften meiner Kindheit (und die liegt EWIG zurück :cheesy: )
@Murdoc_mm
Im Prinzip schon, allerdings habe ich dabei nicht umbedingt an Reifen für einen Monstertruck gedacht ;-)Zitat:
Meinst du solche Reifen die auch RC-Cars haben? Sind die nicht viel zu groß und zu breit?
RC-Cars gibt es ja in x-verschiedenen Maßstäben und entsprechend gibt es z.B. auch kleine Modellbaureifen.
Auf Modellbaureifen bin ich hauptsächlich gekommen, weil man die in sehr unterschiedlichen Gummimischungen bekommt.
Bei Reifen für einen Modellflieger würde vor der Bestellung etwas genauer hinsehen. Die sind teilweise nur nicht aus Gummi sondern aus Schaumstoff und dürften generell eher auf niedriges Gewicht als auf Haltbarkeit usw. ausgelegt sein.
Bei der oben abgebildeten Einstellmöglichkeit für die Laufrolle könnte man an einer der drei Laufrollen vielleicht noch Feder einbauen die die Rolle vor die Felge drückt.
Ich würde auch bei niedriger Geschwindigkeit damit rechen, dass das Ausgleichgewicht relativ schwer sein muss.Zitat:
Ich bin eigentlich immer davon ausgegangen das das Steuergewicht nicht grade schwer sein muss. Bei niedrigen Geschwindigkeiten sollte ein kleines Gewicht auch völlig ausreichen aber bei hohen Geschwindigkeiten (wenn der Bot Stabiler ist) seh ich schon ein das man mehr Kraft haben muss.
Angenommen die gesamte Konstruktion hat ihren Schwerpunkt in einer Höhe von 15cm. Wenn das Rad dann um 5 Grad nach links kippt, liegt der Schwerpunkt ca. 13 mm zu weit links.
Wenn das Ausgleichgewicht 1/10 vom Gesamtgewicht hat und auf Höhe des Schwerpunkts sitzt, müsste man es schon ca 13 cm nach rechts ausfahren um das Gleichgewicht zu halten. Gleichgewicht halten reicht aber nicht - um das Monowheel möglichst schnell nach rechts zurückzukippen, müsste man das Ausgleichgewicht entsprechend weiter ausfahren.
(kann sein, dass ich mich verrechnet habe, wär sicher nicht schlecht, wenn das mal jemand nachrechnet)
Zu Ausgleichsgewicht, Kippen und Kippsteuerung.
Vielleicht überlegt Ihr einmal, ob das Kippen nicht durch das Anfahrmoment eines Schwungrads bewerkstelligt werden kann. Ein Schwungrad mit einer Achse in Laufrichtung des Laufrades, das von einem Motor angetrieben wird, erzeugt beim Hochdrehen ein entsprechendes Kippmoment (kennt jeder Mopedfahrer, dessen Bike eine Kurbelwelle in Längsrichtung hat). Vielleicht reicht schon ein Motor alleine....
Das hätte den Vorteil, dass beim Hochdrehen ein Kippmoment auftritt, das beim entsprechenden Abbremsen eine ähnliche Größe erzeugt, also das Zurückkippen bewerkstelligen kann. Vorteil: der geringe mechanische Aufwand durch einen simplen Motor mit Schwungscheibe ohne Verfahren von einem Gewicht auf z.B. einem Laufbalken. Weiterer Vorteil ist die absolut schnelle Reaktion, die praktisch unmittelbar auf den aufgeschalteten Motorstrom kommt (weil der das Anfahrmoment erzeugt) und die einfache Dimensionierung des Kippmomentes durch eben diesen Motorstrom - - ohne Stellungssensor. Ausserdem kann ein relativ leichtes Schwungrad mit grossem Durchmesser ein hohes Kippmoment erzeugen => leichteres Strukturgewicht der Gesamtausrüstung.
Nachteil: Möglicherweise ist der Energiebedarf höher als bei einem Kippgewicht.
hi,
wir haben uns nun entschieden.
Wir möchten eine Hochschulter Alu (oder Stahl)-Hohlkammer-Felge" in der Größe zwischen 18" und 20" mit passendem Felgenband, Schlauch, und nicht zu grobstolligem Reifen.
Leider sind die nicht so leicht zu finden. Jedenfalls nicht in großer Breite und in der Größe so um die 18"-20".
Hochschulter sollte es schon sein, da diese eine schön geneigte Lauffläche für die Antriebsrollen haben.
Breit sollte sie auch sein. Ist wahrscheinlich leichter zu balancieren als ein ultraschmales Rennrad.
Daran habe ich überhaupt noch nicht gedacht.Zitat:
Zitat von oberallgeier
Das ist sicherlich auch eine mögliche Lösung.
Den erhöhten Energiebedarf hast Du ja schon angeführt.
Weiterhin hätte ich Bedenken, ob das Lenksystem durch Schwungscheibe nicht zu träge reagiert.
Wenn das Rad sehr langsam fährt, muß ja ständig das "Ausgleichgewicht" ein wenig ausgelenkt werden (balancieren um das Gleichgewicht zu halten).
Auf Dein System übertragen bedeutet dies, daß die Schwungscheibe ständig in die jeweils andere Drehrichtung beschleunigt werden müsste.
Es wird auch ständig ein Teil der Energie auf das Rad abgegeben (durch die Reibung der Lagerung - auch bei Kugellagern). Dies könnte dazu führen daß es einen "Drall" nach einer Seite bekommt.
Um die kinetische Energie beim Verlangsamen der so angebrachten Schwungscheibe zu nutzen müßte man dann auch eine aktive Bremse mit einbauen. Je höher die Bremswirkung, um so mehr kinetische Energie wird pro Zeiteinheit auf die Konstruktion abgegeben.
Die freigewordene Brems-Energie sollte dann in etwa die gleiche sein, die beim beschleunigen aufgebracht werden kann, damit man nicht mit zwei unterschiedlichen aufgebrachten kinetischen Energien (z.B: nach links neigen = beschleunigen; nach rechts neigen = abbremsen) rechnen muß.
Ich stelle mir das sehr träge vor.
Insbesondere die elektronische Steuerung, die benötigt wird, ist, glaube ich nicht so einfach aufzubauen, weil das Gleichgewicht und die Lenkung mit einem "dynamischen" System bewerkstelligt werden soll.
Ein Gewicht zu verschieben ist da glaube ich, direkter und einfacher zu handhaben.
Wie denkt Ihr denn darüber?
Sinnvoll fände ich eine Schwungscheibe, deren Achse parallel zur Radachse liegt. Diese könnte die gesamte Konstruktion stabilisieren.
Vor dem losfahren wird der Motor gestartet. Ist die Schwungscheibe mal auf "touren" braucht man auch nur noch wenig Energie, um diese am laufen zu halten.
Ab einer gewissen "Fahrgeschwindigkeit" sollte das Rad auch in Grenzen eigenstabil fahren können und die Schwungscheibengeschwindigkeit kann runtergeregelt werden. Dann ist die Lenkung einfacher.
Wird das Rad wieder langsamer, dreht man die Schwungscheibe schneller.
Gruß, Klingon77
Hi, Klingon77, hallo alle,
Ok, schon gut. Wenigstens wurde es mal überlegt - das Doofe an solchen Projekten ist ja, die Matrix der möglichen Lösungen weitgehend auszufüllen, um nicht "vor lauter Bäumen den Wald.." zu übersehen.Zitat:
Zitat von Klingon77
Wie gesagt, ich verstehe meine Bemerkungen nur als Denkanstösse. Ich finde, dass die Verschiebung des Gewichtes eine mechanische Führung benötigt. Da denke ich, dass eine Schwenkmasse (entweder als negatives Pendel - was mir kinetisch und mechanisch ziemlich suspekt erscheint, oder - besser - einen Schwenkarm mit einem entsprechenden Gewicht) aus Gründen des einfachen Antriebs und der einfachen Struktur sinnvoll ist.Zitat:
Zitat von Klingon77
Im Ürigen wird das System natürlich auch eine ziemliche Regelungsproblematik durch die Präzession :-$
http://de.wikipedia.org/wiki/Pr%C3%A4zession
der Kreiselteile ergeben. Ist allerdings physikalisch gesichert - wenn auch für die meisten total kompliziert ](*,) .
Weiterhin viel Spass, einen guten Wirkungsgrad und viel Erfolg beim Projekt.
Hallo,
die ersten Bilder, Zeichnungen und Maße sind da. Aber erstmal ein riesen Lob an alle die bis jetzt geholfen haben. Macht weiter so. Wir (klingon77 und ich) sind noch auf ein paar kleinere Details gestoßen bei denen wir keine Antwort wissen.
Aber erstmal die Bilder:
Die Felge mit Mantel:

Die neuste Zeichnung des Innenlebens:
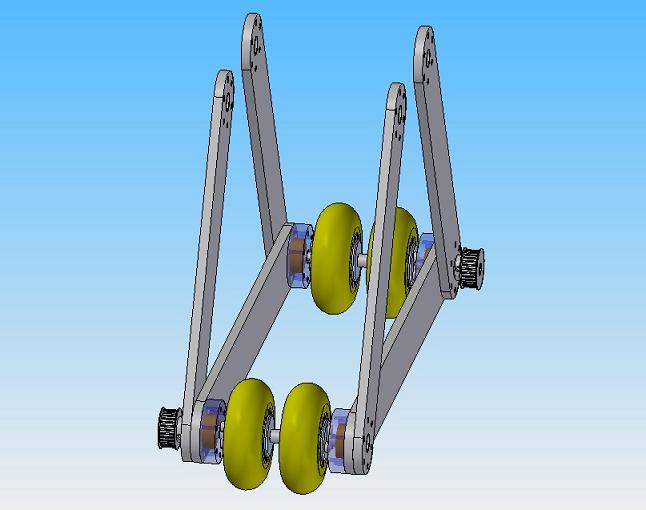
Die zweite Riemenscheibe ist für einen zusätzlichen Motor (kommt vielleicht später) vorgesehen. In die obere Lücke kommt noch das dritte Rad mit einer Spannvorrichtung (Zeichnung kommt später).
Jetzt mehrere Bilder der Laufradbefestigung:

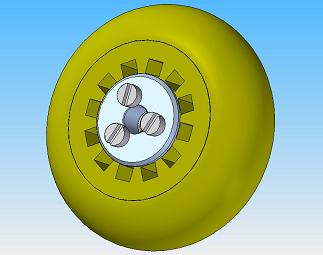
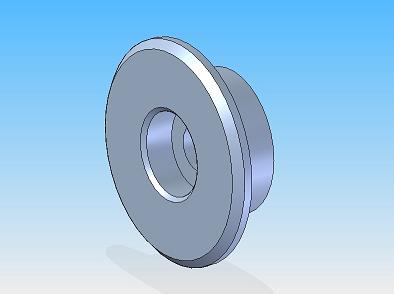
Und hier die ersten fertigen Teile (und die Rollen):

Das Ventil mal etwas genauer: (war bis jetzt ein Sorgenkind aber Klingon77 meint es sei genug platz und damit nicht im Weg)

Das ist bis jetzt der Stand der Dinge.
Noch ein paar Maße:
- die Felge ist 20 Zoll (Hohlkammer-Hochschulter)
- der Mantel ist 20x2 Zoll und ist im aufgepumpten Zustand 44 mm breit
- die Rollen haben einen Außendurchmesser von 70 mm
- das Ventil ist ein Autoventil (damit ich mit meinem MonoWheel auch mal an der Tanke vorfahren kann um den Luftdruck zu messen #-o :cheesy:
An der Klebestelle der Felge (war nicht aus einem Guss) ist ein kleiner Grad der uns etwas Sorgen macht da er die Rollen beschädigen könnte (ein Bild kommt später). Aber das sollte man wegschleifen können.
Es gibt zwar noch weitere Problemchen aber die werde ich später posten wenn wir genauere Daten haben (z.B. hängen wir noch ein bischen in der Motorenauswahl da wir noch nicht wissen wie schwer den der Bot am Ende wird).
So wie findet ihr den Bot bis jetzt? Meinungen, Kritik,.. ist alles erwünscht.
Gruß Murdoc_mm
Naja - genau genommen is ja noch nich viel Bot da :P aber das Rad is hübsch ^^ tjoa das Innenleben sieht gut aus, nur logischerweise (achtung totale Neuheit) müsst ihr natürlich diagonal und überhaupt verstreben, damits nicht einnickt (also diese... Metallstreifen, die nach oben weg gehen)... joa sieht gut aus und gut durchgeplant.
Normalerweise finde ich es auch immer gut sich den Weg für weitere Ausbaustufen und "Eventualitäten" freizuhalten.Zitat:
Die zweite Riemenscheibe ist für einen zusätzlichen Motor (kommt vielleicht später) vorgesehen.
Speziell bei diesem Projekt hier, bin ich allerdings etwas misstrauisch ob das der richtige Weg ist.
Ich befürchte die ganze Geschichte wird nur funktionieren, wenn Massen, Maße, Drehmomente, Drehzahlen usw. aufeinander abgestimmt werden.
Die richtige Motorleistung, Motordrehzahl, aber auch Gewicht, Aufhängepunkt usw. des Motors dürften da eine ziemlich wichtige Rolle spielen.
Daher glaube ich nicht, dass "vielleicht bauen wir ja später auch noch einen 2. Motor ein" da eine besonders solide Grundlage ist ;-)
Zitat:
Die neuste Zeichnung des Innenlebens:
Würde anstatt den Verstrebungen rechts und links von den Laufrollen nicht auch eine Verstrebung zwischen den Laufrollen reichen?
Das Loch in den Laufrollen müsste hierzu doch genug Platz für eine entsprechend "verkantungssteife" Radbefestigung hergeben.
Ob das Sinn überhaupt machen würde hängt allerdings von der weiteren Konstruktion ab, die auf der Zeichnung noch nicht vorhanden ist ;-)
Morgen,
Dann ist das Ventil wieder im Weg, die Plattform währe dann nur an mehrern in einer Linie liegenden Punkten an der Verstrebung befestigt und mit zwei Verstrebungen sind wir 100% verbindungssteif.Zitat:
Zitat von recycle
Deine Argumente gegen zweiten Motor sind richtig aber es gibt auch was das für einen zweiten Motor spricht:
unzwar ganz wichtig wenn ein zweiter Motor verbaut ist ist die ganze Konstruktion symetrisch (warum bauen wir dann nicht gleich so? --> kosten sparen und die Hoffnung das ich die Steuerung so hinbekomm das asymetrie nicht stört).
Gruß
Hi,
zuerst auch von mir vielen Dank an alle, die uns bei dem Projekt helfen! \:D/ \:D/
Aus diesem Grund (Denkanstöße) posten ja mehr oder weniger alle hier. \:D/Zitat:
Zitat von oberallgeier
Auch wir möchten die vielen möglichen Lösungen auf die für uns beste reduzieren.
Die Idee mit dem auslegenden Pendel ist gut, allerdings müsste es auch ziemlich weit oben am Rad aufgehängt werden.
Auf der anderen Seite sollte es uns (bedingt durch die Ausstattung meiner Werkstatt) möglich sein, eine demensprechende Führung aufzubauen.
Das Pendel müsste ja auch sehr genau geführt und vor allem positioniert werden.
Wir freuen uns aber über jede weitere Untersützung und Denkanstöße! \:D/
Du hast recht! Viel Bot ist noch nicht zu sehen und das Rad ist hübsch.Zitat:
Zitat von Lunarman
Die Verstrebungen sind schon richtig und auch unsererseits "angedacht".
Wir müssen aber erst mal die Räder befestigen und dann nach dem Platz für die Streben suchen.
Die "Metallstreifen" sollen aus 40x6mm blank gezogenem Flachstahl (St 37k) hergestellt werden.
Ich glaube, die knicken nicht so schnell ein.
Zwischen die oben offenen Streben soll noch eine gefederte Laufrolleneinheit. Die muß aber noch geplant werden.
Die Federn sollen hauptsächlich den Zweck erfüllen radiale Ungenauigkeiten in der Felge zu kompensieren.
Ein paar 1/10mm Rundlaufungenauigkeit der Felge (sind immer drin) und es wird nur sehr schwer laufen oder "hoppeln".
Wir hoffen auf tatkräftige Unterstützung! :idea: :mrgreen:Zitat:
Zitat von recycle
In einer "ruhigen Stunde", wenn die Planung ein wenig weiter fortgeschritten ist, werde ich mich mal hinsetzen und eine wenig "Gewichte" ausrechnen.
Dann gibt es genauere Eckdaten, mit denen Ihr - wir hoffen darauf O:) - rechnen könnt.
Gruß, Klingon77
Hi,
wir stehen vor einem Problem(chen). Wir können uns nicht für eine Steuerung entscheiden. Ich hoffe ihr könnt uns helfen. [-o<
Zuerst einmal stehen wir vor dem Problem das wir nicht wissen wie viel Gewicht wir zum Steuern brauchen. Und wir wissen auch nicht wie weit wir dieses Gewicht bewegen müssen.
Allerdings sind wir uns sicher das diese beiden Werte zusammenhängen. Ein großes Gewicht auf einer kleinen Strecke oder ein kleines über eine große Strecke bewegt sollte das gleiche ergeben.
Momentan stehen 2 Lösungen zur Auswahl: (ersteres für kleines Gewicht und zweiteres für großes Gewicht)
erste Möglichkeit:
Das ist die Seitenansicht auf einen Servo der in der Plattform angebracht ist. An dem Servo ist an einem Ausleger mit einem (relativ) kleinem Gewicht. Der Servo bewegt also das Gewicht hin und her und steuert damit den Bot. Um mal ein paar Werte zu schreiben ich habe so an 200 gramm und 10 cm auslenkung gedacht.
zweite Möglichkeit:
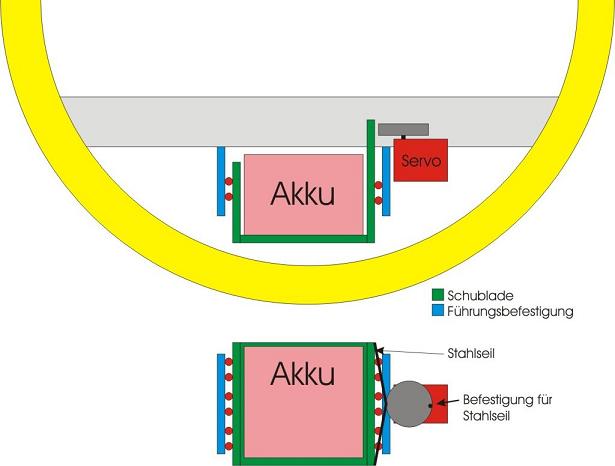
Dies ist die Lösung mit der Schubladensteuerung. Es ist nur ganz einfach gezeichnet also nur eine Prinzipzeichnung. Hier wird der Akku als Gewicht benutzt.
Die obere Hälfte ist das Rad von der Seite.
An die graue Strebe werden die blauen Halterungen angebracht. Dann evtl. die Schubladenführungen (rote Kugeln) und die grüne "Akku-Schublade".
Im untere Bildbereich ist das nochmal von oben skizziert. Das Rad und die graue Strebe sind weggelassen.
Die Befestigung und die Lagerung sind nur eine erste Idee.
Die Schublade kann also nach links und rechts verschoben werden.
Nun zum Antrieb der Schublade:
Das System war noch nicht ganz "ausgegoren". Das Prinzip ist aber recht einfach und auch leicht umzusetzen.
Rechts von der Schublade siehst man den roten Servo und oben aufgesetzt eine Scheibe aus Alu oder Stahl.
Jeweils an die Enden der Schublade kommt ein Stahlseil (Fahrrad-Bremszug oder Klaviersaite oder was anderes).
Dieses Seil wird jeweils eine halbe Umdrehung um den Servo gewickelt und dann dort befestigt.
Die Umwicklung ist nicht gezeichnet.
Wenn man nun die untere Abbildung (Draufsicht) betrachtest und der Servo im Uhrzeigersinn dreht dann fährt der Akku, vom unteren Stahlseil gezogen, nach oben.
Wenn der Servo gegen den Uhrzeigersinn dreht, fährt der Akku, vom oberen Stahlseil gezogen, nach unten.
Bei dieser Möglichkeit ist das Gewicht sehr groß (nämlich das vom Akku) aber der Verschiebeweg eher gering (aber genau). (Verschiebeweg errechnet sich aus der Scheibengröße; z.B. bei einer 20mm (durchmesser) Scheibe bewegt sich der Akku um 15mm nach links und rechts (also gesamtverschiebeweg ist 30mm))
--------------
So das sind die beiden die momentan zur Auswahl stehen.
Und nur ihr: Welche findet ihr besser (heißt günstiger zu bauen und vom Steuerverhalten besser)?
Oder habt ihr noch andere Ideen? (sollten aber einfach zu bauen sein und ein gutes Steuerverhalten haben)
Und hat jemand vielleicht ne Ahnung wie viel Gewicht über welche Strecke bewegt werden muss? (das würde uns am meisten helfen \:D/ )
Gruß
Schönen Abend, Murdoc_mm, schönen Abend, alle,
Hoffentlich wärme ich nix Bekanntes auf, ich hatte diesen Thread ne Weile nicht verfolgt. Ihr habt sicher daran gedacht, dass auch das VERSCHIEBEN des Gewichtes eine Reaktionskraft hervorbringt !?!?Zitat:
Zitat von Murdoc_mm
"Da stelln wir uns maal jans dummm! ... " und setzen uns auf ein Fahrrad. In der Hand halten wir ein ziemlich schweres Gewicht (oder so was ähnliches). Wenn wir nun die Hantel nach rechts bringen - wir wollen sie mal richtig rausstossen - dann fallen wir mit dem Fahrrad etwas nach links (STIMMT genau: nur solange, wie wir stossen, aber wenn wir sie wieder abbremsen, schliesslich ist unser Arm nur von begrenzter Länge, da gehts in die andere Richtung) - und sobald das Gewicht draussen ist, kippen wir nach rechts. Oder nicht?
UND - möglicherweise - wird diese Reaktion unterschiedlich sein, je nachdem ob ihr ein grosses Gewicht nehmt oder ein kleines. Hängt aber natürlich auch vom Abstand Gewicht zum momentanen Drehpunkt (des Rades am momentanen Bodenberührungs-Fixpunkt) ab und von der Grösse der Beschleunigung - wie schnell wir also stossen.
Und im Hinterkopf hab ich immer noch das Präzessionsdingens am Pochen....
hi oberallgeier,
muß zu meiner Schande gestehen, daß ich daran nicht gedacht habe. :oops:
Da hast Du einen "alten Praktiker" mal ganz kalt erwisch! O:)
Ein stoßartiges wegdrücken soll es aber auch nicht sein. Eher eine "fließende" Bewegung mit Beschleunigungs- und Brems-Rampe.
Inwieweit dieser Effekt dann noch zum Tragen kommt, bzw. gedämpft werden kann, kann ich allerdings nicht beurteilen. Das müßte man evtl. empirisch ermitteln.
Wenn ich mich mit unserer (so etwa 17 Jahre alten BMW R80 RT) in die Kruve lege, bleibt das Rad im ersten Moment auch eher senkrecht und "kommt dann nach". Letzendlich ist aber eine Kurvenfahrt (mit minimalstem Lenkeinschlag) möglich.
Wie würdest Du das ausbalancieren und lenken des Mono-Wheels bewerkstelligen? :idea:
Ich bin der ja prinzipiell der Meinung, daß es zu jedem Prblem eine Lösung gibt. Man muß sie nur finden! \:D/
Danke für den Hinweis!... und freue mich auf andere Lösungen! :mrgreen:
Gruß, Klingon77
Hallo Klingon77,
Hmm, so spät am Abend, und nach einem Wettkampf, da schläft mein Gehirn schon grösstenteils - hmmm. Hoffentlich stimmts.Zitat:
Zitat von Klingon77
JAaaaaa - das ist klar. Die BMW ist ja auch nicht VOR Newton gebaut worden, d.h. die wurde gebaut NACH der Erfindung der Trägheitskräfte :) :-b .Zitat:
Wenn ich mich mit unserer (so etwa 17 Jahre alten BMW R80 RT) in die Kruve lege, bleibt das Rad im ersten Moment auch eher senkrecht und "kommt dann nach".
Ausserdem kennst Du bestimmt diese Kurventechnik (am Moped): den kurvenINNEREN Griff nach vorne drücken - dann kommt die Maschine DA WO DU DRÜCKST leicht tiefer und je mehr Du drückst, desto tiefer kommt sie. Diese Methode wurde erfunden, damit man beim Passfahren in engen Rechtskurven mit der linken Hand dem entgegenkommenden Mopedfahrer cool zuwinken kann :-b .
Siehe oben - die Passage mit dem Gehirn. Aber denk an meine Passage mit der Präzession! Nimm doch bitte mal Dein Fahrrad-Rad. Vorderrad (geht einfacher zum Ausbauen). Halte das links und rechts an der Nabenachse. Frau-Kind-Freund-Freundin-oderso soll das Rad mal in Schwung bringen, nicht zuuu langsam (also nicht die Oma fragen). >>>> Und jetzt versuche mal das Rad zu KIPPEN - also wenn Du von hinten auf das Rad siehst - dann siehst Du den Reifen so als ne Art Strich der von oben nach unten geht - Du hältst es doch so, ja? Und nun führst Du die rechte Hand nach unten. UND ? Was tut sich?Zitat:
Wie würdest Du das ausbalancieren und lenken des Mono-Wheels bewerkstelligen?
Nächstes Experiment: Wenn das Rad sich schnell dreht und Du die Achse ruhig hältst - lass mal die linke Hand los (Du weisst ja - entgegenkommendes Moped - cool winken) - und was tut das Rad? :-k
Siehste! Aber so total intus habe ich den Effekt leider nicht ](*,)
hi,
ist schon klar... Trägheit der Masse. Das schnell drehende Rad wird nicht (nur langsam) kippen, wenn ich eine Seite loslasse.
Weiterhin wird es, beim loslassen (winken) mit einer Hand sich drehen wollen.
http://www.physik.uni-wuerzburg.de/v...2versuch6.html
Gruß, Klingon77
hi,
http://www.physik.uni-wuerzburg.de/p...2versuch5.html
Wenn man sich das Video anschaut, könnte es funktionieren.
Über einen stabilisierenden schnelldrehenden Gyro haben wir schon mal nachgedacht, um die Stabilität insbesondere bei niedrigen Geschwindigkeiten zu erhöhen.
(Anfang des Videos ohne angehängte Gewichte).
Wenn wir dann ein Gewicht auslenken z.B: den Akku, sollte sich je nach der Seite, nach der man das Gewicht verschiebt, durch die Präzession auch das Laufrad drehen, aber nicht oder nur sehr wenig neigen.
Habe ich das richtig verstanden?
Habe noch nie mit irgendwelchen "Kreiseln" gearbeitet und Zweiräder fahre ich (ohne Verstand #-o rein intuitiv :mrgreen: )
Gruß, Klingon77