




 Zitieren
Zitierenja natürlich sollte es da eine Reaktion auf dem Display geben. Aus 0 wir 1 beim Drücken. Prüfe doch so wie fabqu schon schrieb, Vorsichtig alle Kontakte, Kabel und Lötstellen.

 Werbung
Werbung


ich habe die LEDs beim nachlöten natürlich geschrottet, habe sie also durch zwei normale, 3mm low-current ausgetauscht, beide leuchten beim betätigen des jeweligen bumpers. Beim ablauf der demo_3 blinken die LEDs abwechelnd , wenn dann im LCD display die anzeige "0 <BUMPER> 0" erscheint leuchten sie zwar immer noch beim betätigen des bumpers auf, in den LCD-anzeige selbts gibt es aber keine reaktion, auf beiden seiten keine.Zitat von fabqu

Soll es dort eine geben?
gruß inka
ja natürlich sollte es da eine Reaktion auf dem Display geben. Aus 0 wir 1 beim Drücken. Prüfe doch so wie fabqu schon schrieb, Vorsichtig alle Kontakte, Kabel und Lötstellen.
Gruß TrainMen
habe ich eigentlich schon:
- lötstellen bumperboard
- lötstellen multi-IO
- kabel durch ein anderes ersetzt
welche von den kontakten/signalen am kabel auf der multi-IO seite sollten beim betätigten bumper schliessen?
gruß inka
Die Signale gehen "durch die LED".
Das geht also genauso wie bei den vorderen LEDs/Bumpern:
Die LEDs können vom uC angesteuert, also an/aus geschaltet werden.
Wird ein Bumper gedrückt, erhalten die LEDs nun ihren Strom durch den Bumper, nicht mehr durch den uC -> sie leuchten.
Der uC schaltet nun (siehe Dirks Libs) immer wieder für eine sehr kurze Zeit die LED aus (sollte sie an gewesen sein), schaut ob dennoch eine Spannung anliegt (eben wenn der Bumper gedrückt wurde) und schaltet sie wieder an (wenn sie vorher an war).
So kann die LED als ein- und als Ausgang dienen.
Wenn also deine LED bei Bumper-Betätigung funktioniert, aber im uC kein Signal ankommt, dann teste mal die Verbindungen ab der LED bis zur MultiIO:
Das Signal geht vom Bumper (der ja funktioniert) über den mittleren Bumper-Kontakt zur LED sowie zu einem Widerstand, R23 und R24 (je einer pro Bumper) auf der Rückseite, mittig, der Bumperplatine. Von dort aus geht das Signal zu den Pins 2 und 3 der Pinreihe, gezählt "von links" wenn man aufs Bumperboard schaut.
Von dort geht ja das 7polige Kabel zur MultiIO, dort gehen die Signale weiter zu den Pins mit der Bezeichnung "ON-R" und "ON-L" über dem ADC-Mxxx-Stecker. Die jumper müssen von diesen beiden Pins auf die Pins mit Nummern "8" und "4" gehen, dort geht das Signal dann auf den 10poligen ADC-Mxxx-Stecker und von dort dann zur jeweiligen RP6-Platine (M32, M128 oder M256).
Du kannst auch an all diesen Punkten das Signal mit einem Oszi, Multimeter oder sonst was nachmessen. Als Referenz nimmst du eben GND, ist ja auf der MultiIO genügend vorhanden.
Ich hoffe das hilft!
Grüße
Danke Fabqu!
das war eine beschreibung des weges für die fehlersuche wie sie nicht besser sein kann
ich habe an allen genannten punkten gegen GND eine spannung von ca. 1,6V und bei gedrücktem bumper von ca. 5V gemessen. Also wie gesagt: letzte messung am Pin 4 bzw. 8. , am ADC Mxx konnte ich nichts mehr messen (wusste nicht wo), habe dann das 10polige kabel durch ein anderes ersetzt - die meldung vom bumper kommt am LCD nicht an!
der wahljumper soll auch jetzt so aussehen, nehme ich an:

gruß inka
Hi!
Alse ... ne
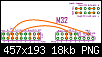
Dieser Wahljumper regelr, wo die Signale der Sharps/SRF02 am Bumperboard gehen UND ob ich die LFS-Platine (orange Jumper in deinem Bild) oder die Touch/3V3-Messung nehmen möchte.
Was du brauchst ist folgendes:

Dort siehst du den Pin-Jumper-Block direkt oberhalb des ADC-Mxxx Wannensteckers.
Die beiden Orange eingezeichneten Linien legen die Signale der Bumper ( "ON-R" und "ON-L" ) auf die Pins 4 und 8 des ADC-Mxxx-Wannensteckers.
Diese jumper kannst du immer drauf lassen, man muss sie eigentlich nie ändern (außer, man will hier wirklich was komplett anderes anbringen). Du könntest diese beiden Pins auch (auf der Board-Unterseite) miteinander verlöten, dann brauchst du keine Jumper verschwenden. (aber wirklich nur den Pin "ON-L" auf Pin "4" und "ON-R" auf "8" !!!!! )
Grüße
Hi Fabqu,
und was ist mit den anderen verbindungen zwischen ON-L und 8 bzw. ON-R und 6? Entweder jumper zwischen ON-L und 4 /ON-R und 8 oder diese jumper, beides geht nicht...
abgesehen von den || strichen zwischen eben diesen kontakten die du mit den jumpern verbinden willst?
bei der verbindung wie im bild M32 dargestellt blinken die LEDs beim ablauf der demo_03 abwechselnd, bei deiner version nicht...
gruß inka
Ah, moment...
du hast ja die M32. Da bin ich grade überfragt, ob es da sinn macht, die Bumper-IO's mit dem IO-Mxxx-Wannenstecker zu messen, oder mit dem ADC-Mxxx-Wannenstecker.
Dirk? Wie ist das in deinen Libs?

Bei der M32-Lib sind die Bumper an PC4 und PD6, also an IO-Mxxx.
Dazu müssen die Verbindungen so hergestellt werden, wie im M32 Kapitel des RN-Wissen-Artikels unter "Bumper anschliessen" beschrieben ist.
Hat man diese Verbindungen (noch) nicht hergestellt, müßte man zum Testen der Bumper an ON_L und ON_R messen.
Gruß
Dirk
ich habe jetzt die verbindungen durchgemessen: beide pins (PC4 und PD6) des atmega32 auf der M32 haben kontakt zu den bumpern, 1,6V (bumper nicht betätigt) und ca. 5V bei geschlossenem/betätigten bumper, gemessen gegen GND auf dem EXT steckpin der BASE. Die LEDs blinken beim start der demo_03, reaktion auf dem LCD auf das drücken der bumper erfolgt nicht...
Was und wo kann ich noch messen/testen?
edit: schon seltsam die rp6-welt: ich habe jetzt die unveränderte RP6Control_MultiIO_03.c neu kompiliert und die meldung der bumper erscheint auf dem LCD-display. Hat jemand dafür eine erklärung?
Geändert von inka (20.09.2013 um 12:06 Uhr)
gruß inka
 Berechtigungen
Berechtigungen

Lesezeichen