Mikroplatine zur Servoansteuerung
Hallo alle,
etliche Servos der Billig(st)klasse
......
liegen bei mir defekt rum aus den letzten Tagen. Sie waren für den Fortschritt bei meiner archie-Hand-Entwicklung hinübergegangen. Nun will ich diese Servos wiederbeleben. Schon gut, ich weiß - viel Arbeit für Billigteile - aber ich fände es interessant und lohnend. Das könnte ich auch in (m)einen eher problemtischen Savöx einbauen.
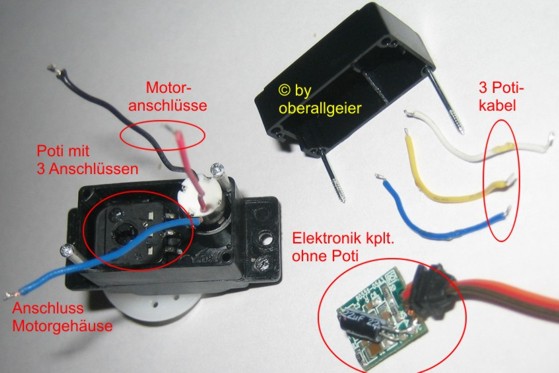
Der Einbauraum wäre die Stelle (siehe oben "Poti mit 3 Anschlüssen") in der ich eine Platine 11mm x 11 mm und 9 mm hoch einbringen könnte (Anschluss noch nicht überlegt). Es wäre also Platz für ATmega168/328 TQFP (ich hatte den auch schon QFN gelötet beim Austausch auf babyorangutan) - und einen Motortreiber, z.B. den TB6612FNG für 2 Kanäle je 1,2 A - also für rund 2,4A bei parallelen Motoranschlüssen.
Anmerkung: der TB6612FNG hat eine nicht sooo pfiffige Motoransteuerung; ich benutze den (auf der babyorangutan-Platine) z.B. bei archie im Handgelenk für einen Mikro-Getriebemotor mit Modellbauservo-Ansteuerverhalten. Daher die Frage: gibt es ähnlich kleine - 8mm x 9 mm - Motortreiber mit vergleichbarer Belastbarkeit ?
Das Ganze soll als eine Art "openServo" gebaut werden auf eine Platine ähnlich der oben gezeigten "Elektronik kplt. ohne Poti". Der openservo ist mir einfach viel zu groß. Spezifikation wäre dann etwa: 5V (evtl. 6V - dann bräuchte ich nen mikroskopischen Spannungsregler für den Controller), max. 1 A, Drehwinkel ca. 180° mit theoretischer Auflösung 1023 (entsprechend ADC) usf. Da ich in den Einbauraum auch ne dreifach-Buchse unterbringe, wäre ein UART denkbar, mit dem die aktuelle Grundstellung abgefragt werden könnte - alternativ auch I²C . . .
Fragen:
- mit wie wenig Abblockkondensatoren lässt sich der 168er bei 8Mhz/intern betreiben?
......Ich hab ne tiny13-Servotester, interner Takt, OHNE alles Hühnerfutter :-) - läuft störungsfrei.
- hat jemand etwas ähnliches schon gemacht ?
- bekommt man in dieser Größe schon irgendetwas zum Überspannungsschutz ?
- Kann jemand nen mikroskopischen (siehe oben) Spannungsregler empfehlen? LDO!
- Welcher Motortreiber wäre noch verwendbar?
- Welche update-Frequenz sollte ich wählen ? Welche PWM-Frequenz für den Motor ?
- Ich habe noch ein paar A3901-Treiber rumliegen. Die sind mit 2x400 mA aber doch eher schmalbrüstig.
- Hat jemand Erfahrung mit Seeed und dort mit Platinen mit Mehrfachnutzen?
- Welche Platinendicke würdet ihr nehmen (machbare/lieferbare Werte)
- gäbs sonst noch was zu beachten?
- Sonstige Anregungen ?
Danke im Voraus für eure Hilfen
Nachtrag
08. Dez. 2017. Projekt wird wegen geringen Realisierungschancen nicht weitergeführt, siehe Beitrag vom 8.12.2017
Liste der Anhänge anzeigen (Anzahl: 1)
Zitat:
Zitat von
oberallgeier

Bisher hatte ich meist Motortreiber der Art L293D verwendet, bei denen zwei "Richtungspinne" und ein PWM-Eingang verwendet werden - und sonst nix. Da unterscheidet sich der 4950 doch deutlich
Nicht wirklich. Der L293 hat zwei Eingänge, die jeweils eine Seite der Brücke ansteuern. Und dann gibt es einen weiteren Eingang, der die Brücke komplett abschaltet. Den kann man benutzen, um die Brücke mit einer PWM zu modulieren, man kann aber auch die PWM, je nach Drehrichtung auf den einen oder den anderen Brückeneingang legen. Der 4950 realisiert das mit nur zwei Eingängen. In dieser Tabelle sind die möglichen Schaltzustände aufgelistet
Anhang 32976
Interessant sind die beiden obersten und die beiden untersten Zeilen. Gibst du auf einen der Eingänge die PWM und hälst den anderen Eingang auf 0, dann schaltet die Brücke zwischen gesteuert und abgeschaltet hin und her. Das entspricht dem Mode, den du beim L293 verwendet hast.
Eine H-Brücke hat aber noch mehr Zustände, das Timingdiagramm direkt vor der gezeigten Tabelle zeigt andere Modes.
Mit der PWM, insbesondere wenn sie schneller als mit 50Hz (20ms) so mit ein paar kHz läuft, wird der Strom im Motor schon mal begrenzt. Nun hat der 4950 aber auch noch eine eingebaute Strombegrenzung. Dazu wird über einen Shunt, im Datenblatt Rs genannt, der Strom gemessen. Rs sollte so gewählt werden, daß beim maximalen Strom nicht mehr als 0,5V an ihm abfallen. Da passen 0,1 bis 0,2Ω. Den Strom, ab dem die Brücke bremst, stellt man mit der Spannung am VREF Pin ein. Da tuts ein Spannungsteiler an deiner µC Versorgung oder zum Entwickeln ein Poti.
MfG Klebwax
Motortreiber TOSHIBA TB6612FNG kaufen ? Für 20 Versandgebühr :-/
Bei diesem Projektchen habe ich nach Lieferanten für nen Motortreiber TOSHIBA TB6612FNG gesucht. Wesentliche Kaufentscheidung ist die niedrige Motorspannung < 5 V und ein Ausgangsstrom von 1.2 A(ave)/3.2 A (peak) PRO Kanal ; d.h. das Bauteil kann notfallmässig > 6 A Peak beherrschen.
Mir wurde hier schon der 4950 empfohlen, der aber erst ab 8V spezifiziert ist; die 8 V Versorgung kann ich nicht aufbringen, ich bin da auf max 5,0 V begrenzt. Ich habe noch ein paar A3901 hier, die können aber nur 400 mA pro Kanal, also mit beiden Kanälen als Spitze grad mal 0,8 A - das ist deutlich zu wenig.
Soweit ich es beurteilen kann ist der TOSHIBA TB6612FNG nur über Mouser erhältlich. 10 Stück kosten dort 13,90 - der Versand nochmal 20. Das erscheint mir reichlich hoch - da wäre es für erste Muster denkbar ein paar Motortreiber mit aufgelötetem Toshibachip zu kaufen und den Chip abzulöten - aber blöd wär das schon!
Kennt jemand Alternativen? Ein alternativer Treiberchip oder ein alternativer Lieferant (na ja, Aliexpress liefert vielleicht sogar das - aber . . . hmmm . . . ein anderer wär mit lieber).
Danke für Eure Hilfe
