Wie immer ein geniales Video. Die Qualität ist uch nicht schlecht.
MfG Hannes

Druckbare Version
Wie immer ein geniales Video. Die Qualität ist uch nicht schlecht.
MfG Hannes
Hi,
alles in allem, Projekt und Video, wow. Mir fehlen die Superlativen. Hab einen sehr guten Eindruck bekommen, was Dein Tricopter kann. Beim Video waren mir die Sequenzen von den einfachen Flugbewegungen eine Idee zu lang. Das soll aber die Bewunderung überhaupt nicht einschränken. Klasse die Nahaufnahmen, Zeitlupen und der Trick mit der Transformation in grüne Schrift/Formeln. Es lohnt sich bestimmt auf Dein nächstes Projekt zu warten.
Gruß
Searcher
Hi William,
das ist einfach un - glaub - lich !
Ich bin begeistert und werd mir das noch öfters ansehen. Am besten gefällt mir der Einflug durchs Fenster in das Gebäude.
grüsse,
Hannes
Hallo William,
bin auch total begeistert von deiner Presentation und natürlich auch
von dem Tricopter.
Als gebürtiger Bremer in Bayern bin ich auch stolz, daß so ein dolles
Projekt aus meiner Heimatstadt kommt (fast so, als wenn Werder die
Bayern im Fußball einseift).
Ich würde mir wünschen, daß sich ein Hersteller findet, der aus deinem
so perfekt entwickelten Tricopter einen Bausatz in Lizenz herstellt.
Der würde dann mit mir am bayrischen Himmel seine Künste zeigen.
Ich bewundere es, wie du die Regelungstechnik so hinbekommen hast,
daß ein Copter auch mit 3 Motoren so stabil fliegt.
Viel Erfolg bei deinem nächsten Projekt
Olaf
Moin! Die HD version ist endlich verfügbar:
http://www.vimeo.com/6766174
@vistauser: Ein Bremer in Bayern, eieiei... Allerdings bin ich ursprünglich Hamburger :-D Da haben die Bremer doch irgendwie was gegen... ;-D
Ich werde in meinem Blog und hier mit der Zeit mal mehr Details posten, so dass ein Nachbau machbar wird. Aber das dauert natürlich noch etwas.
Könntest du dann auch ein bisschen auf die Hardware deiner früheren Version/Variante mit den noch etwas billigeren Motoren, Rotoren, Sensoren usw. eingehen?Zitat:
Ich werde in meinem Blog und hier mit der Zeit mal mehr Details posten, so dass ein Nachbau machbar wird. Aber das dauert natürlich noch etwas.
Die wäre für Leute mit kleinerem Budget vielleicht auch interessant.
Ich vermute für viele Leute bräuchte so ein Copter nicht so leistungsfähig zu sein wie deiner, weil ihnen für Loopings und Kunstflug, sowieso deine jahrelange Erfahrung mit anderen Fluggeräten fehlt.
Welche Motoren und Propeller du anfänglich verwendet hast, hast du ja bereits gepostet.
Interessant wäre z.B. welche Regler dazu passen, wie die Propeller befestigt werden, wie schwer das Ganze damit maximal werden darf usw.
geiles Projekt!!
Ich geh mit 2 Arbeitskollegen grad auch einen Tricopter an.
Die ersten Teile sind schon bestellt - aber das dauert sicher noch eine Weile :)
Hey Willa,
hab das zwar weiter oben schonmal gesagt, aber ich denk "dein Projekt hier ist wirklich genial" klingt nie abgedroschen oder :)
Beim schnellen überfliegen des Artikels hab ich nichts näheres zu deinem Matlab Programm gefunden. Was genau macht das eigentlich, stellt das "nur" Lage und Verhalten deines Tricopters dar, oder kannst du damit auch simulieren (zum Beispiel entstehende Momente beim beschleunigen der Motoren)?
Besteht ne Chance, dass du die Matlab Sourcen online stellst? Ich wäre sehr interessiert daran, arbeite zur Zeit relativ viel mit Matlab (allerdings in einem völlig anderen Sektor) und würde gern meinen Horizont erweitern. Und das geht ja schließlich mit Beipsielen am besten ;)
MfG
Daniel
Hallo!
Matlab ist bei der angesprochenen Verwendung nur für die Lagevisualisierung zuständig. Ist halt eine Spielerei, aber ich wollte mal gucken was Matlab so für 3D Sachen kann. Matlab Quellcode ist auch angedacht zu veröffentlichen. Aber wie gesagt möchte ich das nur mit ner wirklich guten Dokumentation zusammen machen und das dauert noch etwas Zeit...
Servus Willa,
Meinen absoluten Respekt bei der neuen Definition des Fliegens. Dein Video finde ich sehr gut das Modell in Szene gebracht.
Für etwas unbedarfte möchte ich nur anfügen, mit Matlab kann man Matritzen direkt definieren/berechnen, wenn auch etwas (Interpreter)-behaftet, was den Speed gegen C weit drückt.
Viel Erfolg weiterhin.
Grüße Wolfgang
hi Willa,
auch meinen Respekt, wahnsinn. Das Teil wirkt absolut professionell. Guter Videoschnitt und geile Musik.
Ich schneide auch ne Menge Filme selber und weiß, wieviel Mühe das macht und wieviel Zeit man damit zubringt.
Das mag stimmen, aber bei unseren modernen Computern ist Rechenzeit ja meist im Überfluss vorhanden... Außerdem wurden einige Funktionen in Matlab in "maschinensprache" implementiert (nicht von mir, Gott behüte...!), dadurch laufen diese Funktionen extrem schnell. Nebenbei kann Matlab mit einem Klick und ein paar Zeilen Codes mehrere Prozessorkerne parallel für die Analyse nutzen.Zitat:
Für etwas unbedarfte möchte ich nur anfügen, mit Matlab kann man Matritzen direkt definieren/berechnen, wenn auch etwas (Interpreter)-behaftet, was den Speed gegen C weit drückt.
DER riesen Vorteil bei Matlab ist einfach die Entwicklungsumgebung. Da hat man in Nullkommanix eine Bildanalyse programmiert für die man in C wohl mehrere Wochen benötigen würde.
Anwendungsabhängig haben Jungs an dem Institut an dem ich bin schon nen Geschwindigkeitsfaktor 10 mit Portierung auf C rausgeholt, aber das hängt immer stark davon ab wie gut sich die gegebene Aufgabe mit Matrizen und Matrixoperationen darstellen lässt (was bei den ganzen Ingenieursaufgaben zumeist recht gut funktioniert). Zudem kann man ja geschriebenen Matlab Code recht leicht in C-Code umsetzen lassen um zu beschleunigen und dann per MEX Files wieder in Matlab einbinden.
Hi William,
ich hab mal danach gesucht, wieviel Schub der Heckrotor bei konventionellen Hubschraubern ausmacht. Das sind wohl stolze 10 bis 25%. Man sieht ja auch bei denem beweglichen Heckrotor, das er zum Teil ordentliche Ausschläge macht. Das hast du auch glaube ich irgendwo mal geschrieben.
Was währe denn, wenn man den Ausleger dieses Rotors länger macht. Von der Seite der Technischen Mechanik stelle ich mir vor, das sich irgendwo am Copter durch die Überlagerung der einzelnen Drehmomente und dem Schwerpunkt die Hochachse ergibt. Wenn man jetzt mit einem möglichst langen Hebel gegen das dortige Drehmoment drückt, wird die nötig Kraft mit zunehmendem Arm ja kleiner. Villeicht lässt sich damit die nötige Schrägstellung verkleinern und mehr Schub zum eigentlichen schweben nutzten.
Gruß,
The Man
Das wird wohl nicht viel bringen.
Dann würde man die vorderen Motoren mehr belasten, dann liefern die mehr Drehmoment und man hat nix gewonnen.
Hi The Man,
die beiden vorderen Motoren haben einen entgegengesetzten Drehsinn. D.h. der Heckmotor muss nur sein eigenes Drehmoment ausgleichen. Im Schwebeflug würde ich den Kippwinkel der Propellerebene des hinteren Motors auf ca. 2-3° schätzen. Ich glaube da sind keine großen Verluste zu erwarten... Aerodynamisch ist das ganze ja eh ein riesen Schlamassel (so kleine Propeller mit ner ziemlich hohen Drehzahl und die sind dann auch noch so dicht beiinander), da müsste man mit den Optimierungen vielleicht an anderer Stelle anfangen.
da sprichtst du was an mit dem "dicht aneinander"
könnte es nicht strömungsbegünstigend wirken, wenn du um deine rotoren herum einen ring hättest !?
das würde auch interferrierende druckwellen von den rotor-blatt-enden minimieren
und ein gewissen schutz würde es auch bieten (kontakt mit hindernissen ... oder gar körperteilen)
So ein Ring ändert auf jeden Fall die Aerodynamik. Die Randwirbel werden dadurch unterdrückt/ vermindert, allerdings hat man auch eine enorme Wandreibung der Luft am Ring. Welcher Vor-/ Nachteil da überwiegt kann ich pauschal nicht sagen, da müsste ich mich erst einlesen.
Ich habe mal den kommentierten Quellcode vom Trackingdingsbumms hochgeladen:
Zitat:
I got a lot of requests for the matlab source code of my tracking algorithm. As you will see, it is not that complicated. I did not upload the complete source code, because that doesn't make too much sense. My GUI for example, contains a lot of code and it is most likely irrelevant to most of you. I left out the calculations of the different parameters for my PID control loop too, they will make things appear more complicated than they really are.
Here comes the code:
http://www.villalachouette.de/willia...ertracking.htm
If you have questions, I would suggest that you put them into the comments for this post. Doing so, more people might benefit from it.
Man kommt um dieses Projekt einfach nicht rum :D
Es ist echt wunderbar was du hier mit relativ einfachen Mitteln bewerkstelligt hast. Ein echtes Vorzeigeprojekt ;)
beste Grüße
the.speciali
ps: die Ausleger waren doch mal länger und als sie kürzer gemacht wurden haben sie doch nix an der Aerodynamik verändert oder? Blick da bei der vorherigen Diskussion nicht ganz durch^^
Hallo the.speciali,
Das weiss ich auch nicht genau... Aber jeder Propeller für sich erzeugt eigentlich eine Art "Torus" (Ringwirbel) um sich herum (die sind gar nicht mal so klein). Je weiter diese Dinger voneinander weg sind, desto kleiner ist die gegenseitige Beeinflussung der Propeller. Die ganze Aerodynamik eines solchen "Propellersystems" mit zwei gleichsinnig drehenden und zwei gegenläufigen Propellern ist aber nicht mehr ganz trivial. Wäre eine sehr interessante Forschungsaufgabe das ganze mal in 3D zu messen...Zitat:
die Ausleger waren doch mal länger und als sie kürzer gemacht wurden haben sie doch nix an der Aerodynamik verändert oder?
Danke für die schöne Zusammenfassung, da wird einem einiges klarer^^
Interesant wäre es alle mal sowas in 3D zu messen, nur ich glaub so ganz einfach zu realisieren ist das nicht, wobei ich auf diesen Gebieten eigentlich kaum Ahnung hab :D Bin froh wenn ich etwas in 2D darstellen kann und dies dann auch berechnen kann, ganz zu schweigen von 3D und dann noch so komplizierten Sachen wie Wirbeln und deren gegenseitige Beinflussung...
Ich mache in meiner Doktorarbeit eigentlich genau das: Messung von instationären Strömungen in 3D. Aber bei Vogelflügelmodellen und nicht bei Propellern... Aufgrund der ziemlich schnellen Strömungsgeschwindigkeit wäre das eine Herausforderung ans Equipment... Auch wenn man die Versuche in Wasser macht.Zitat:
Interesant wäre es alle mal sowas in 3D zu messen, nur ich glaub so ganz einfach zu realisieren ist das nicht
Aber von Propellerumströmungen habe ich auch nicht so viel Ahnung... Wäre zwar auch ein schönes Thema, aber wie relevant sind die Ergebnisse...? Noch sind Copter hauptsächlich Spielzeuge (auch wenn die Dinger mehr und mehr für weniger verspielte Zwecke eingesetzt werden).
Hi!
Da mir das ganze Layouten einer neuen Steuerplatine nicht so richtig viel Spaß macht, werde ich jetzt wohl eine Art fertige Mega168 Grundschaltung kaufen:
http://www.watterott.com/Arduino-Mini
Da ist der meiste Krempel schon drauf, dadurch wird das Layouten der restlichen Beschaltung viel einfacher. Außerdem spart man auch wieder Gewicht. Und ein Nachbau wird dadurch ebenfalls einfacher. Werde mir demnächst mal überlegen was ich dann noch so alles an Beschaltung brauche.
Oder gibt es noch andere (ebenfalls günstige) Alternativen zum Arduino Mini? Der Arduino Nano ist mir schon wieder zu teuer, auch wenn man dann gleich einen schicken USB Anschluss auf dem Board hat (braucht man aber auch nicht wirklich...)
Hallo!
Ich habe das Arduino Lily-Pad, das könnte vielleicht auch etwas sein:
http://www.watterott.com/Arduino-Lil...ste-Generation
Wird glaubich sogr mit so einem FTDI - USB adapter geliefert und man braucht nur ein USB-mini-Kabel
lg
Ich lese diesen Thread schon längere Zeit mit, und ich muss sagen RESPEKT für diese Leistung.
Ich habe selbst schon überlegt mir sowas nachzuabeuen, allerdings fehlt mir zur Zeit das nötige Kleingeld. Außerdem würde ich wahrscheinlich an den Regel-Algorythmen verzweifeln :D
Wegen dem Layouten der Steuerplatine kann Abhilfe geschaffen werden :)
Wenn du einen fertigen Eagle-Schaltplan hast, kann ich dir gerne das Layout machen.
Da ich selbst aber nur die Light-Version habe sollte, der Platzbedarf der Bauteile halbes Europaformat nicht überschreiten :/
MfG
- AVR-Frickler -
Hi!
@portege_moi: Das Lilypad habe ich mir auch schon angeschaut und fand es ziemlich hübsch. Aber ich möchte halt etwas möglichst kleines und billiges, das ist der Arduino mini pro besser geeignet.
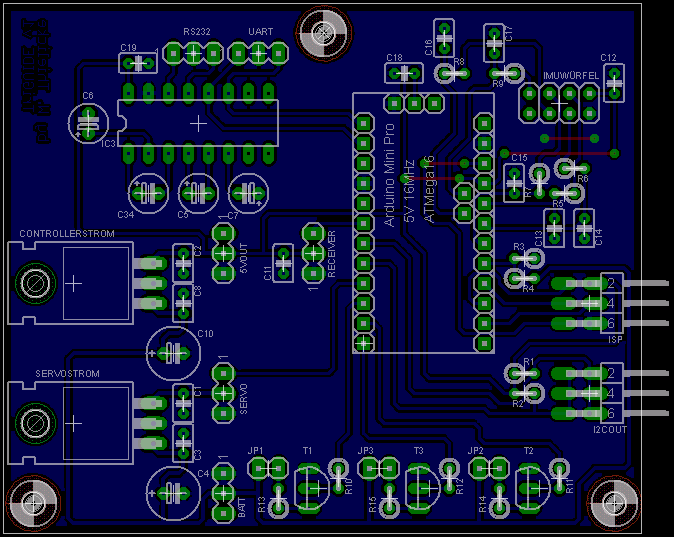
Der Schaltplan steht übrigens mittlerweile, ebenso ein laienhaftes Layout, welches ich auch im Moment fertigen lasse:
Externes Bild anzeigen
Das Layout ist einseitig, auch wenn es aufgrund der hohen Zahl an Drahtbrücken (rot) mehr den Flair einer Lochrasterplatine hat...
@AVR-Frickler:
Schaltplan und Board gibt es als Eagle Dateien hier.
Es wäre natürlich fantastisch wenn sich jemand bereit erklärt das Layout professionell zu machen. Meine Anforderungen an das Layout: Klein, einseitig und kein SMD. Außerdem sollte es für den Heim, Wald und Wiesenätzer herstellbar sein. Die Befestigungsbohrungen sind 2.2mm, und sie sollten ungefähr so angeordnet sein wie in meinem Layout (unten links und rechts eine Bohrung, dann noch oben in der Mitte eine).
Wenn sich jemand der Sache annimmt schon mal herzlichen Dank im Voraus!
Oha da sind ja noch so einige vagabundierende Masseflächen :D wundert mich ein wenig das Eagle die überhaupt geflutet hat.
Einseitig bei 'Heimanwendungen' sehe ich noch ein, kein SMD nur teilweise zumindest bei Kleinteilen wie Kondensatoren und Widerrständen kann man doch eine ganze Menge Platzspren und sind auch nicht schwer zu löten. Ich mach mittlerweile nur noch SMD, naja ich hab ja auch auf der Arbeit genug Übung in SMD löten und das entsprechende Equip :D
Ich werd mal sehen was sich da machen lässt :)
Weil man das einstellen kann? (und sollte!)Zitat:
Zitat von AVR-Frickler
also smd löten tu ich widerstände und kondensatoren. aber die 0805 reihe die sind dann doch noch recht handlich.
@william:
sag mal deine akku überwachung würde ja jetzt super zu meine neuen (deinen alten) akku passen. wie hast du das angestellt? bestimmt über nen spannungsteiler?! hast du da mal die werte für mich und könntest du mit vieleicht den quellcode dafür zukommen lassen? die beispiele die ich hier habe hauen irgendwie alle nicht hin :(
gruß und bis demnächst, Bammel
Ich hab das Layout mal überarbeitet.
An der Schaltung habe ich nicht geändert, ich habe nur ein paar Baugruppen verschoben, z.B. die Ansteuerung für die LED's um nicht die 12V über die ganze Platine zu verteilen. Ich hoffe das passt mit den Kabeln noch :)
Außerdem habe ich auch den Isolierungsabstand des Polygons von 0,8mm auf 0,4mm reduziert, sollte immer noch gut Ätzbar sein. Ich selbst habe früher in der Wanne mit 0,25mm Isolate und 0,2mm Leiterbahnen geätzt.
Wenn es es nicht geht kannst du den Isolierungswiederstand wieder hochstellen, musst dann halt nur schauen wie es mit der Masseflächse aussieht.
Leiterbahnstärken habe ich soweit übernommen.
Was ich leider nicht verbessern konnte ist die Masse für den ADC, aber da du bisher wohl keine Probleme damit hattest, sollte es jetzt immer noch klappen. Stellt man hier auf SMD um und tauscht vielleicht noch GYROROLL und GYRORAW am Stecker oder am AVR-Port könnte es etwas besser aussehen.
Ich hoffe es gefällt und funktioniert immer noch :)
MfG
- AVR-Frickler -
Sollte die Platine tatsächlich noch korrekt funktionieren, dann meinen Respekt, AVR-Frickler. Super Arbeit!
Aber ich denke, man könnte die rote Top-Leitung rechts unten bei den beiden Pinheadern auch noch einsparen, durch Umrouten von 2 Leitungen.
Hmm hast recht da sollten sogar 2 Brücken wegfallen und zusätzlich verbssert sich die Masse für den ADC :)
*freu* Ich konnte beim Layout helfen. :)
Das ist ja auch der Sinn dieses Posts. Das Optimieren des Layouts durch mehrere Leute.
So hier das aktuallisierte Layout, hab noch zusätzlich den Stecker für die Gyros (Warum bekomme ich nun Hunger ?*g*) nach oben verschoben und die GND-Brücke dadrunter.
Dadurch kommen die Bezugspotenziale für R3, C13, C14 und C15 nochmal näher zur ADC-Masse.
Schaut nicht schlecht aus. Einige Dinge sind mir noch aufgefallen. Warum ist die Bahn von C4 zu C10 (die unterm Spg-Regler für Servostrom durchgeht) so lang? Die Leitung vom Servoanschluss zum µC könntest du mit 45° legen, damit ist sie kürzer. Die Stecker am unterenPlatinenrand würde ich etwas anders platzieren, damit man es leichter anschließen kann. Z.B. den Bat Anschluss etwas von C4 weg, damit man es besser anschließen kann.
Hey, prima wie hier mein Layout verbessert wird! Das ist von der "Aufgeräumtheit" ja gar kein Vergleich mehr zu meinem Versuch. Es gibt da wohl nur ein paar Geschmackssachen, z.B. würde ich UART und RS232 Stecker nicht direkt nebeneinander machen sondern ein bisschen Platz dazwischen lassen. Die Zuleitung zum Servo würde ich auch so dick wie möglich machen, da fliessen schon mal 1A Strom. Dann würde ich noch versuchen den Receiver Stecker und den Servo Stecker näher zusammenzubringen, und den 5V Stecker irgendwie an den Rand. Habe mir das noch nicht in Eagle angucken können, das mache ich heute abend mal.
Vielen Dank schon mal!!
Ist wohl schon ne Angewohnheit von mir, wie gesagt ich nutze sehr viel SMD, da mache ich es auch so wenn ich mehrere Spannungsregler drauf habe, damit ich mir nicht die Kühlfläche/GND zerschneide. werde ich noch ändern.Zitat:
Zitat von 021aet04
Naja ist Geschmackssache, ich habs lieber eckig :DZitat:
Zitat von 021aet04
Ich werd C4 wohl etwas rüber schieben und dann den Stecker Quer legen.Zitat:
Zitat von 021aet04
Hehe hast Angst die Stecker zu verwechseln und dann den AVR zu killen?Zitat:
Zitat von Willa
1A ? Ok mit soviel habe ich nicht gerechnet, allerdins ist das ne 0,4xx mm dicke Leitung da sollten 1A drüber gehen ohne das was abraucht.Zitat:
Zitat von Willa
Nun weiß ich warum das Servo nen eigenen Spannungregler hat :P
Kann man machen, allerdings bei 1A muss schon fast aufpassen das man keinen Spannungsabfall über die Leitung hat!Zitat:
Zitat von Willa
Wie oben schon geschrieben, man kann ihn noch um 90° drehen wann man C4 etwas verschiebt.Zitat:
Zitat von Willa
Ich werde da heute noch nichts weiter drann machen, mal sehen ob noch jemand was findet, werde dann morgen die Änderungen machen.
Mfg
- AVR-Frickler -
Hi!
Hab mir das Layout in Eagle noch nicht angucken können, denn ich war heute mit dem neuen Leichtbau-Chassis beschäftigt. Es ist fast fertig. Die Platten sind aus CFK-Balsastirnholz Sandwich und extrem leicht. Ich habe jetzt endlich auch eine glänzende Oberfläche, da ich auf zwei sogenannten "Lacktischdecken" laminiert habe. Durch die doppelte Sandwichstruktur wird das ganze auch sehr steif. Ansonsten bin ich fast komplett auf M2 umgestiegen und habe dünnere Delrinblöcke verwendet. Ich verwende teilweise Kunststoffschrauben / -muttern und habe darauf geachtet so wenig Schrauben wie möglich zu verbauen. Leichter geht jetzt glaube ich nicht mehr.
Externes Bild anzeigen
Sandwichteile und Delrinblöcke
Externes Bild anzeigen
Links alt, rechts neu (etwas kleiner, weil die Platine und der Akku kleiner werden)
Externes Bild anzeigen
Kunststoffschrauben wo es möglich war...
Externes Bild anzeigen
81g für das komplette Chassis... ein Wert der Hoffnung macht, wenn man bedenkt, dass ein einzelner Motorträger vom alten Chassis schon 25g wog...
coole sache!!!!
dan muss ich beim nächsten besuch ja mla ne gewichtsprobe machen ^^
hast du jetzt eigentlich schon den neue akku?