bei mir mäht seit einem Jahr ein Automower
Eigenlich war ich schon seit Jahren schwanger einem Bot der mähen kann zu bauen. Hatte viele Ideen, aber keine Zeit. Um überhaupt mal mit einem Bot erfahrungen zu machen, habe ich mit vor ca 10 Jahren eine RugWarrior gekauft. Das Teil, mit MC68HC11 und C-Interpreter, ist ja nicht schlecht, aber sau-teuer.
Weil ich aber keine Zeit hatte, und nicht die große lust auf Mähen, kam letztes Jahr der Electrolux Automower ins Haus.
Der AM macht seine arbeit sehr ordentlich - wirklich ! Seit er da ist, habe ich den alten Mäher nur zwei mal benutzt. Einmal weil ich im letzten Herbst und jetzt im Frühjahr das Laub, abgebranntes Feuerwek usw. eingesammelt habe.
Im AM werkelt ein: Motorola DSP56F807.
Seine Energie bekommt er von: 15 NIMH Zellen. 18V/2200mAH.
Antrieb: Zwei Schrittmotore mit Getriebe für die Hinterräder
Mäher: Ein (drehstrom ?) Motor 40 Watt.
Navigation: Induktionsschleifen.
Je nach Temperatur und Rasenhöhe mäht er etwa 30 bis 60 Minuten. Dann sucht er seine Ladestation.
Wenn nach ca. einer Stunde die Akkus geladen sind, macht er sich wieder an die Arbeit.
Die Messer halten ca zwei Monate.
Einen Neigungs-Sensor (AOSI von www.hy-line.de) hat er auch. Zur Sicherheitsabschaltung und anpassen der Fahrweise am Hang.
Auch der Mähmotorstrom wird überwacht. Auch zur sicherheitsabschaltung und anpassung der Fahrgeschwindikeit.
Wenn ich auch schon einen MÄ-Robbi habe - einen selbstgebauten möcht ich immer noch haben. Schon wegen der Software-Bastelei. So gut der AM auch arbeitet - es fällt mir immer noch was ein - was er eigentlich besser mache kann !
Am meisten stört mich das chaotische hin und her fahren. Auch wenn es funzt, eine richtige Navigation würde mir besser gefallen.
Zum Automower und zu seinem vorläufer Solarmover gibt es im Forum http://www.foren.de/system/index.php?id=corsatimo noch jede menge Infos.
Ich habe noch einen Selbstbau-Mäher gefunden: http://www.betuwe.net/~mowbot/Mowing/mowing.html
Der AutoMower und seine Schleifensignale
Gestern Abend, als die Tageshitze nachließ, habe ich mal einen Blick in die Ladestation des Automowers geworfen.
Gefunden habe ich dort eine SMD-Schaltung mit:
einen PIC 16F628A mit 4MHz Quartz.
einen LM 393M.
sieben Transistoren die so ausehen als konnten sie ein bischen Leistung bringen.
ca 10 Transistorn im Fliegen-Dreck-Format.
und noch diverse R,C, und L's.
eine 4Pol. Steckverbindung zu den Schleifen in der Bodenplatte.
eine 6Pol. Steckverbindung. 2Pin zum Trafo-Anschluss (24Volt), 2Pin zu den Anschlüssen der Begrenzungsschleife und 2Pin zu den Andock-Kontakten für den Mäher zum Ackkuladen.
eine 1Pol Steckverbindung für die optionale Suchschleife.
zu guter Letzt noch eine blinkende LED und einen mehrpoliger Stecker der vermutlich zum PIC führt (Diag ?).
Vorsichtig habe ich dann mal meinem Uralt-Oszi angeschlossen. (ich habe keine Lust, wegen meiner Neugierde demnächst selbst zu mähen)
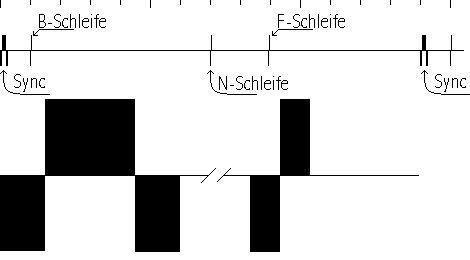
Gefunden habe ich ein Signal, das sich mit 14 MilliSekunde wiederholt.
Das Startsignal wird für 0,1ms negativ, dann 0,2ms positiv, dann wieder für 0,1ms negativ. Nach 1.0ms kommt ein Signal das anscheinend Daten enthält. Ich konnte es nicht synchronisieren aber es wird positiv und negativ. Da nach der Beschreibung der Mäher nur mit seiner Station zusammen arbeitet, wird hier eventuell der Code eingebaut (wegen der Diebe).
Mir ist dann eine Idee gehommen. Der Mäher bekommt seine Schleifen-Info von je einer Spule mit Kern vorne und hinten. Also habe ich mir eine sehr ähnlich aufgebaute Drossel aus einem def. Netzteil, aus meiner Kiste mit "Dinge zum wegwerfen zu schade" geholt. Die beiden Spulenenden meines "induktiven Sensors" habe ich dann an den einen Tastkopf des Oszi angeschlossen. Der andere war ja noch auf dem "Sync".
Ja, nun kam eigentlich der "AHA-Effekt".
Der Sensor sagt (ich unterschlage mal den Sync) ausserhalb der Begrenzungsschleife Piek nach oben, gefolgt von einem Piek nach unten. Ganau auf der Leitung ist nix zu sehen und innerhalb der Schleife ist das Signal umgekehrt.
Das sogenannte N-Signal kommt nach 7ms, das F-Signal nach 9ms.
Das N-Signal scheint von einer Spule in Form einer ligenden 8 (eine 8 wie bei den 7-Segment Anzeigen) in der Bodenplatte zu kommen. Das Signal wechselt in der Symetriachse der LS, ist dadurch vom AM beim einparken mit dem vorderen Sensor sehr leicht zu detektieren.
Das F-Signal ist eine Spule die fast am äusersten Rand in der Bodenplatte ist.
Also: Die Steuerung muss das "Sync" erkennen und dann im Zeitraster die positiven und negativen Pripsel einlesen. Wichtig ist festzustellen ob erst der positive oder negative kommt.
Die Signale sehen so aus, als würde der Gleichstrom-Anteil ausgeglichen. (dann wird der Draht auch bei beschädigung der Isolierung nicht sofort elektrolytisch zerfressen) Ist dann auch leichter eine virtuellen NULL-Punkt zu erzeugen.
Nun ja, irgend wie kommt mir die Sache bekannt vor. Das gab es doch so, oder so ähnlich beim Lesen und Rekonstruieren von Daten bei magnetischer Aufzeichnung (self-Clocking Demudolator for PM-Data).
Ich geb ja zu, es is schon ne weile her. Damals gab es noch keine Gigabyte-Festplatten mit SAT-A Anschluss. Ist eher die Technik "C64 mit Datasette". Wenn ich mal Google befrage nach Stichwörtern wie MFM, FM, NRZ,Cell Period usw. wird sich das bestimmt finden lassen.
Ist also nix geheimnissvolles, hat auch nicht viel mit "Weidezaun" zu tun.
Mann brauch nur ein par Impuse zu erzeugen die ein Magnetfeld aufbauen. Die Transistoren schalten vermutlich den positiven bzw. negativen Strom (vermutlich Konstant-Stromquelle ?) auf die entsprechende Signal-Leitung. Wichtig ist meines erachtens nur wie steil die Flanke ist. (deshalb die L's auf der Elektronik, sonst senden wir auf allen Frequenzen ) :-#
Lesen kann man solche Signale, bei ausreichender Feldstärke auch noch wenn sie vom MARS kommen. Ich bekomme aber nur die Feldänderungen mit! Wenn das Magnefeld sich nicht ändert, habe ich kein Signal, die Magnetfeldstärke spielt dann keine Rolle. Wenn die Impulse nur in eine Richtung gehen, treibe ich die Sender, Sensoren und Verstärker leich in die Sättigung. Aus den detekierten Flusswechseln muss ich dann den Lesetakt, die Synchronisation und letzt endlich meine Daten erzeugen.
Begrenzungsschleife und Sensoren AutoMower
Ja, du hast recht. Die Schleife ist nach Bedienungsanleitung zu verlegen.
Ich schreib mal, auf was es ankommt. Die Ladestation steht so, das der AM möglichst ohne Steigung oder Gefälle einfahren kann. Die Bodenplatte soll zur Hälfte innerhalb der Schleife sein. Auch nicht am Ende einer schmalen Passage - rechts und links noch ca. 2m ohne Hindernisse. Rechtes Ende der Begrenzungsschleife an den rechten Anschluss, Linken an den Linken.
In der Bedienungsanleitung steht nichts von der Suchschleife. Das es diese Möglichkeit gibt, habe ich auch erst durch den Service erfahren.
Die Suchschleife wird an einer beliebigen stelle der Begrenzungsschleife angeschlossen und dann auf dem gewünschten Weg zur Ladestation geführt. Die Letzten zwei Meter sollen gerade zur Bodenplatte geführt werden. Dann in der Mitte der Bodenplatte unter dieser hindurch zu einem Anschluss, der nur nach entfernen von zwei Torxschrauben auf der Elektronikplatte finden ist. Es existiert noch nicht einmal eine Bohrung um den Draht einzuführen.
Die beiden Sensoren im AM sind senkrecht angebracht. Der Drahtwickel im Sensor liegt, er misst also die Feldlienien die sekrecht nach oben und unten gehen. Sie liegen in der Symetrieachse, in etwa dort, wo man sich die Vorder- und Hinderachse vorstellen kann. Der Alte AM (kenn ich nur vom höhrensagen) hatte angeblich nur einen Sensor. Ich habe beobachtet, wie der Mäher sich langsam dreht. Anscheinend kalibriert er dabei die beiden Sensoren.
Wie die Schleifen in den Bodenplatte wirklich sind kann ich nicht sagen - ist verklebt. Nur die Drähte zu Elektronik kommen da raus. Ich habe gestern Abend mit Bleistift den Nulldurchgang auf der Bodenplatte markiert. Ich denke wenn für die Begrenzungschleife ein Draht für über 1000m² reichen, dann brauchs für die Ladestatinon auch nicht mehr.
Die induktive Verbindung ist möglicherweise bidirektional. In der Anleitung steht, wie man den Sicherheits-Code ändern kann. Den AM in die LS stellen und dann im Sicherheitsmenue den Code ändern. Dann dauert es einige sekunden - im Display steht dann das die daten zur LS übertragen werden - ab dann ist der AM mit seiner LS verheiratet. Es besteht auch die Möglichkeit mehrere Geräte an der gleichen LS zu betreiben. (... also Mehrfach-Ehe ? ) Die Mäher müssen aber den gleichen Code benutzen. Möglicherweise kann eine der Spulen in der LS auch Daten lesen ? Ich tippe auf den vorderen Sensor und die F-Schleife.
in der Patentschrift von Andre Colens gibt es auch noch Infos:
IMPROVEMENT TO A METHOD FOR CONTROLLING AN AUTONOMOUS MOBILE ROBOT ET RELATED DEVICE
Inventor: COLENS ANDRE (BE) Applicant: SOLAR & ROBOTICS S A (BE)
EC: G05D1/02E12W IPC: G05D1/03
Publication info: EP1470460 - 2004-10-27
Skizen: hab ich schon versucht aber ich stell mich wohl zu blöd an. Ich bekomme immer nur einen Link .. aber der nützt nix wenn ich keinen WEB-Space habe !
Bei www.automower.de gibt es einige Skitzen und Videos zum AM und der Installatinon.
...noch was: Hat schon mal jemand mit RFID-Tags experimentiert.
Wenn Katzen und Hunde mit sowas herumlaufen, warum soll mein robbi auf sowas verzichten.
* Sender-Empfänger um die Dinger auszulesen. ?
* selektives lesen - was ist wenn mehrere in reichweite sind ?
* Reichweite zB. wenn ich die Tags auf den Boden klebe ?
* wer hat schon was mit der Motorola CPU "DSP56f807" gemacht.
Da auf dem AM-Bord sonst nichts besonderes drauf ist, scheint die ja fast alles zu können, was man so für einen Robbi braucht.
http://motorola.uestc.edu.cn/docback...SP56F807PB.pdf