Liste der Anhänge anzeigen (Anzahl: 4)
Robotron T2 [Update]
So die Cam ist mittlerweile am Pan & Tilt Kopf befestigt und liefert klasse Bilder. Nebenbei habe ich noch die beiden Akkupacks zusammengelötet (6x 1,2V mit 3500mAh) und verbaut. Einmal im Originalbatteriefach und einmal unterm ebbedded Board.
Zusätzlich habe ich noch eine Aluprofil an der Seite angebracht, um den USB-Buchsen,dem Schalter und der Ladebuchse halt zu geben.
Die letzten Tage habe ich dazu verwendet die UART-Verbindung zwischen Board und Motortreiberboard zum laufen zu bringen. Das Board kann jetzt Befehle entgegennehmen und darauf reagieren. Die Befehle sind noch einzelne Buchstaben. Ich kann den Bot mittels W,A,S,D ausm WLAN sogar fahren lassen =D>
Als nächstes werde ich mir eine Befehlsliste zusammenstellen. Mein eigentliches Ziel ist es ein Commando-Parser zu integrieren, damit man sich nicht die einzelnen Buchstaben merken muss.
Und ja die Odometrie fehlt immer noch :-(
weiter gehts... =D>
Liste der Anhänge anzeigen (Anzahl: 2)
Mahlzeit :-D
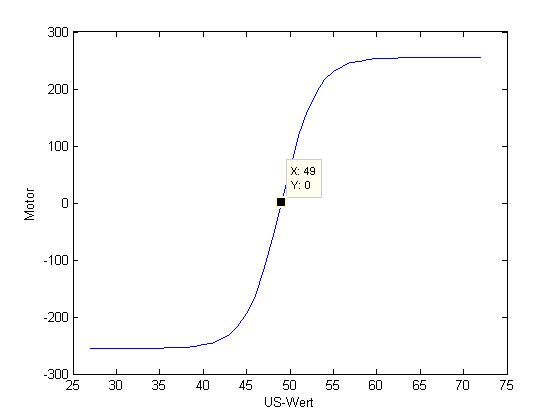
Ich habe noch ein wenig rumgebastelt und meine Funktion etwas angepasst. Ich habe dir ja erzäht, dass meine Motoren erst so ab 150 losrollen. Dem entsprechend habe ich die Funktion angepasst.
Klar man hätte einfach sagen können wie mit Grenzwert,
wenn PWM unter 150 dann PWM = 150
bäh sowas mag ich nicht :-D
Das ist danna uch eine gerade Strecke im Graphen schaut unschön aus.
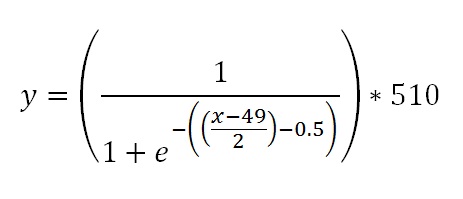
Deshalb habe ich diese gerade Strecke abgerundet. So sind zwar in der FUnktion zwei if-Bedingungen aber dafür reagiert er jetzt noch schöner.
Ich muss sagen ich bin nicht so gut in Mathe, das:
[0:150] soll heißen 0 bis 150. Also das Intervall 0-150
War mir jetzt unsicher ob das ein - oder : Zeichen ist.
Also hier:
Die Zahlen habe ich auch verändert... weiterhin gilt falls was unklar ist einfach Fragen :-D ich weiß ja nciht ob jeder meine chaotischen Gedanken nachvollziehen kann :-D
[edit]
@Rabenauge
Nunja das ist vorerst ein Antikollisonssystem. Es funktioniert mit dem Objekt die vor dem Sensor. Beim Ultraschall wirst d direkt nciht feststellen können wo sich das Objekt befindet. Es sei denn du machst eine Triangulation mit zwei Sensoren.
Mit dem IR weißt du schon wo sich das Objekt befindet, unzwar direkt vor dem Senor :-D. Da kannst du auch ur das messen was sich vor dem Sensor befindet.
Wieso willst du wissen wei viele Objekte es gibt? Wichtig ist ja nur ob du fahren kannst oder nicht.
Willst du eine Karte erstellen muss man die Sache anders angehen. Da ist dann wieder scannen angesagt aber die zwei Sachen sind von Grund auf verschieden. Entweder du erstellst eine Karte, berechnest den Weg und fährst oder du hast ein ACS, Antikollisionssystem, fährst und erstellst derweil die Karte, so werde ich es machen.
Also die Frage ist wieso du wissen willst wie viele Objekte vor deinem Roboter sich befinden.