Dann stellt's doch bitte mal ein, interessiert mich auch.

Druckbare Version
Dann stellt's doch bitte mal ein, interessiert mich auch.
nen richtigen Namen hat das eigentlich nicht. 2 Motoren gehen auf Reduktionsgetriebe, deren Abtriebe durch ein Kegelraddifferenzial verbunden sind.
Hier findest Du einen publizierten Vortrag darüber:
http://wwwiaim.ira.uka.de/germrob/FA...FA413_2008.pdf
Diese Antriebsart heißt Summendifferenzgetriebe und wird z.B. in Raupenfahrzeugen verwendet da man dann nur einen großen Antriebsmotor für den Vortrieb und einen relativ kleinen für die Lenkbewegung benötigt. Dies Art Antrieb ist selbsthemmend und kann stufenlos unter Volllast von vorwärts auf rückwärts umgesteuert werden.
Tja, einfach aber nicht schlecht. Kein Thema, sowas nachzubauen :-)
So, und nun im Ernst: ich hab selbst vom groben Prinzip keinen Pfifferling verstanden beim Anblick des PDF. Den Mathekram habe ich vorsichtshalber überflogen um noch heilen Geistes den Tag zu überstehen und die Bilder sahen zwar nett aus, konnten mir aber das mechanische Prinzip dahinter nicht verdeutlichen. Google hüllt sich zum Thema Summendifferenzgetriebe auch in Schweigen ...
Gruß MeckPommER
@Hessibaby Sicher, dass es so heisst? Google spuckt dazu nichts aus, ich würde nämlich auch gerne mehr darüber wissen als das was ich vom Chef bekommen hab.
Im Modellbaumagazin "Rad und Kette" hat es vor einigen Jahren mal eine mehrseitige Abhandlung zu dem Thema gegeben.
Schnappt euch einfach mal ein Differential aus dem Legokasten und spielt damit rum, das sollte alles erklären ;)
hey das teil habe ich schonmal irgendwo gesehen!
genau sowas währe gradezu perfekt für mein robi.
sogar die abmessungen würden stimmen.
na da haste ja ein goldstück ausgebuddelt...!
edit: das mit dem bidirektionalem signal kabel, ist doch eigentlich einfacher als man denkt..
das beste beispiel ist doch wohl das telefon..!
da geht auch der strom der das telefon betreibt(bei herkömmlichen telefonen),
und das signal über eine einzelne leitung, und dazu halt noch nen ground.
tja also mal nen telefon auf dem flohmarkt kaufen, und auseinanderbauen. :-)
Viel Erfolg!
Kleine Frage: Wieviel Erfahrung hast du bisher mit analoger Schaltungstechnik?
Unsere Erfahrung ist, dass du mit der Komplexität deines angestrebten Systems sehr schnell in teufels Küche kommst, wenn keine strikte galvanische Trennung zwischen Logik- und Arbeitskreis besteht. Sicher, bei kleineren Robotern oder Basteleien mag das gehen, aber wenn man größere Motoren (die entsprechende Störungen auf die Leitungen bringen) und mehreren über Bus-Systeme vernetzen Controllern arbeitet gibt das sehr schnell Probleme. Da liegt hier mal das Gehäuse plötzlich auf Masse oder da zerhauts nen Controller, bloß wegen elektrostatischer Entladung am Metallgehäuse (was auch immer), werden da paar Spikes in den I²C eingespeißt...
Ich denke alleine an einer sicheren Daten- und Stromverbindung über 2 Adern kannst du sehr lange sitzen. Ob es den Aufwand Wert ist weiß ich nicht.
Telefon ist analog; wenn's da mal knackst stört dich das nicht weiter; wenn da aber gerade die Pipe zum Bein abreißt schon...
na ein analog modem arbeitet doch auch ähnlich bzw. auf die selbe weise.
die daten werden ja auch nur über eine leitung geschickt.
wie beim telefon.
nur das beim telefon die spannung ja dauerhaft übertragen wird(mit dem signal).
aber halt nur strom zum tele und daten bidirektional.
ich bräuchts halt mit beidem bidirektional.
ich hab mir das bei der spannung so überlegt, das einfach gemessen wird, ob das bein ne höhere interne versorgungsspannung hat wie der connector vom body oder halt niedriger.
je nach dem muß eben spannung abgenommen, oder halt eingespeist werden.
aber da das bein ja eh nen wlan datenport hat,
wird sich das alles eh nur auf die spannung begrenzen,
weil die daten ja über funknetz übertragen werden können.
genauso wie die abhandlung ob das bein strom bekommt, oder eben halt liefert.
was die galvanische trennung betrifft, der body connector hat natürlich dann nur das gelenk als gnd, um den abstand zu überbrücken, und die abnehmer zu reduzieren.
ansonsten ist alles getrennt, und hat auch eigene versorgungskreise.
das gelenk mit dem bodyconnector ist nur ne ausnahme.
und wegen der analogen schaltungstechnik, ich hab da sogut wie noch keine ahnung.
deswegen werd ich das mit der datenleitung wieder einstampfen wegen dem wlan.
Im Truckmodellbau werden z.B. die Trailer (Anhänger) über im Königbolzen eingebaute IR-Koppler angesteuert. Da gibt es unterschiedliche Verfahren. In der Einfachversion wo nur die Lichtfunktionen gesteuert werden wird nur der Ausgang eines Empfängerkanals per IR auf den Trailer übertragen. Bei den Versionen wo der Trailer noch gelenkt wird, die Aufliegerstütze rauf-/runtergefahren wird etc. werden mehrere Empfängerausgänge über IR aufmoduliert. In allen Fällen besitzen die Trailer eine eigene Stromversorgung.
Der Vorteil ist, das trotz Drehung des Königbolzen in der Sattelplatte eine saubere, galvanisch getrennte, Datenübertragung stattfindet.
Gruß
klingt interessant Hessibaby.
aber ich denke mal das die datenverbindung übers wlan abgehandelt wird.
muß mir dann nur ne gute lösung für die spannungsübertragung einfallen lassen.
ABER...
da ich in kürze umziehen werde, hab ich mein technik koffer schon mal gepackt,
und ich kann erstmal "nur" trockenübungen machen.
muß halt mal das hirnschmalz etwas tun :-)
kleines hardware update.
gestern sind meine solarzellen angekommen!
daten: 0,5V 0,8A.
anzahl: 26
nun muß ich mir nurnoch überlegen wie ich die am sinnvollsten kaskadiere.
ich hab mir überlegt mehrere doppel module zu erstellen mit je 1V 0,8A,
und diese dann in reihe und parallel zu schalten um auf 8V zu kommen.
das robobein wird mit 7,5V angetrieben.
also sollten 8V ladespannung ok sein, zumal ich dann auf ungefähr 1,6A komme.
hier nen bild:
Externes Bild anzeigen
Mahlzeit,
sehr ambitioniertes Projekt muss ich sagen. Anscheinend nach dem Motto "Viel hilft viel" ;-)
Nee, jetzt mal im Erst. Ich habe mal einen Blick auf deine Mechanik geworfen und muss sagen, dass ich ersthaft bezweifel, dass das gut funktioniert. Wie HannoHupmann schon sagte, sind so viele Freiheitsgrade pro Bein für eine (elegante) Fortbewegung gar nicht nötig (siehe Natur). Sie bringen nur Probleme. Durch das notwendiges Gelenkspiel wird ein Bein mit vielen Gelenken wacklig und instabil. Von Robustheit, die für Outdoor-Anwendungen immer nötig ist, kann da keine Rede sein. Ein zweiter Punkt, der gegen viele Gelenke spricht, ist die aufwendige Generierung des Bewegungsmusters. Soll heißen, laufen mit vielen Gelenken ist unütz umständlich und kompliziert und eine geschmeidige Bewegung bekommt man damit nicht hin. Auch für eine angebliche Kletterbewegung braucht man nicht so viele Gelenke. Da reichen schon wenige, nur eben an den richtigen Stellen.
Ich würde auf jeden Fall empfehlen, das Grundkonzept nochmal zu überdenken, bevor man 20000 verpulvert. Erst überlegen, was man für Aufgaben, Bewegungen etc. realisieren will und dann schauen wie man das am besten schaffen kann.
Bei Vorhaben, die mechanisch relativ komplex sind, lohnt es sich schon ein bischen Gehirnschmalz in die Auslegung zu investieren. Ansonsten macht sich dann schnell Frust breit, wenn nichts richtig funktioniert.
So, ich hoffe, dass war jetzt nicht allzu demotivierend ;-)
Gruß,
Distel
ich kann mit Distel nur anschliessen. Wenn man sich die am weitesten entwickelten Maschinen anzieht, die raues Gelände geeignet sind, wird man sich immer in der Natur umsehen müssen. Diese zeit deutlich, dass 2-3 Gelenke pro Bein vollständig ausreichen.
@AmyS3 überleg dir bitte nochmal genau was das Bein machen soll und was es können muss und dann schau wieviele Gelenke dafür notwendig wären.
danke erstmal für die konstruktiven vorschläge.
ich muß aber zu meiner verteidigung sagen, das ich mir sehr wohl genaue gedanken über die übermäßige bewegungsfreiheit gemacht habe.
der roboter wird sich überwiegend in sehr felsigem gelände aufhalten.
dazu zählen auch das erklimmen/überwinden von felsspalten, abgründe, felswände ect.
daher wird der roboter auch "relativ" groß und benötigt eine enorme bewegungsfreiheit.
ich hab mir auch diesen "kletter roboter" angesehen der an felswänden hochklettern kann.
manko an dieser konstruktion ist jedoch, das er eben "nur" klettern kann bzw. soll.
deswegen hat er auch nicht soviele gelenke, da er diese aufgabe mit seiner bewegungsfreiheit schaffen kann.
ebenso habe ich mir auch die roboter von den raumfahrt behörden angeguggt, die ja eigentlich für "rauhen" untergrund konzipiert sind angesehen,
und mußte feststellen, das auch diese milionen teuren konstruktionen schon bei einem kleineren felskamm die flinte ins korn werfen und drumherum herumfahren müssen.
auch der kletter roboter könnte dieses hinderniss niemals überwinden, weil es in seiner konstruktion nicht berücksichtigt ist.
bei der natur habe ich ebenfalls sehr genau hingesehen und sogar meine "hausspinne" walter eingehen beobachtet.
walter ist übrigends eine ganz normale kreuzspinne die sich bei mir zuhause eingenistet hat,
und aus mücken gründen bei mir ein visum auf lebenszeit hat.
naja zumindest bis ich ausgezogen bin (ich überlege mir aber walter mitzunehmen).
so ein spinnenbein hat übrigends 7 glieder, was bedeutet das ich mit meinen 7 gelenken garnichtmal so falsch liege.
wobei ein spinenbein über 12 freiheiten verfügt
zudem erhalten einige tiere ihre kletterfertigkeit nur durch den "hährchentrick" (van-der-waals-kraft).
diesen trick kann ein roboter jedoch noch nicht nutzen bzw. würde mich in unsummen stürzen um soetwas für den roboter zu entwickeln.
hier mal nen link: http://www.netzmagazin.ch/135/wissen/400.html
um zu der stabilität zu kommen die distel angesprochen hat, ist das nur eine frage der richtigen umsetztung mit augenmerk auf ein extrem geringes spiel an den gelenken und deren anordnung.
da der roboter aber nicht ausschließlich kletterbewegungen ausübt,
währe eine für kletteraufgaben optimierte gelenkstruktur nur zum nachteil,
da diese dann in ebenem gelände widerum nur bedingt tauglich ist und in der regel dann einen höheren energieaufwand aufweist.
um den energieaufwand in ebenem gelände gering zu halten,
habe ich ja auch vor an jedem bein ein rad mit eigeständigem motor anzubringen, und die beinkonstruktion so zu fertigen, das es eine art "ruhestellung" der beine gibt, bei der nur das rad und ein einzelnes gelenk zum steuern angesprochen wird.
außerdem ein aspekt haben fast alle roboter mit der natur gemeinsam: das exoskelett!
demotivierend war dein beitrag mit sicherheit nicht distel!
es ist nur ein ansporn noch genauer hinzusehen.
@hannohupmann: ich habe mit 3 gelenken angefangen und bin am schluss bei 7 gelenken angelangt.
nimm dir einfach mal deinen arm als anschauungsobjekt, und zähl mal nach wie viele freiheiten dein arm hat (schulter bis handgelenk. ohne finger).
also ich für meinen teil zähle da 7 freiheiten. 5 knick-, und 2 drehfreiheiten. (je nach betrachtungsweise)
beim menschlichen bein ebenfalls.
dieses schema ist fast in der gesamten tierwelt zu erkennen(zumindest bei land tieren).
was man aber dazusagen muß, ist das die natur bessere gelenke hervorbringt als wir in der robotermechanik herstellen bzw. nutzen können.
z.b. das kugelgelenk in unserer schulter oder bein.
welches gleich mehrere freiheiten mit nur einem gelenk ermöglicht.
daher kommt auch mein bestreben für ein 3 achs gelenk in einer einzelnen einheit mit einer dreh und 2 knick freiheiten.
was zusätzlich noch zur stabilität beiträgt die distel angesprochen hat.
die mechanik von meinem robibein ist für allround aufgaben/terrain gedacht.
aber es wird sicherlich noch eine ganze menge zeit ins tal wandern bis die konstruktion von dem robobein abgeschlossen ist.
vorschläge, anreize,ideen und kritik sind bis dahin weiterhin willkommen.
mfg AmyS3
p.s.: für die solarzellen hab ich inklusive versand grade mal 24,90 gezahlt.
EDIT: villeicht sollte ich den titel vom thread ändern, weil es ja inzwischen mehr um die mechanik anstatt um das controllerboard geht ^^
hi,
wenn Du so über die Freiheitsgrade eines Kugelgelenks schreibst.
Wäre ggf. ebenfalls eine Möglichkeit.
Kugelgelenk und Seilzüge oder Gewindestangen mit "Vorspannung".
Vorteil:
Mehr Freiheitsgrade mit weniger Gelenken und weniger Spiel.
Nachteil:
Gleitreibung statt Rollreibung.
liebe Grüße,
Klingon77
genau das hab ich mir auch überlegt, als ich dein schultergelenk gesehen habe.
zwei seile mit ner feder dazwischen, wo am sinnvollsten gleich ein zug/druck sensor angebracht ist, und das dann von deinem schultergelenk zu einem hebel oder ähliches um das gelenk zu stellen.
mit dem zugsensor könnte man dann gleich die belastung messen, und entsprechend reagieren z.b. den strom erhöhen/senken.
Moin,
ich möchte nochmal meinen Senf dazu geben, weil einige grundlegende Dinge so nicht richtig sind.
Zu den Raumfahrtrobotern, möchte ich nur sagen, dass hier die Rahmenbedingungen ganz andere sind. Und warum sollte man über einen Felsen klettern und dabei Millionen teure Instrumente riskieren, wenn man auch drum rum fahren kann? Außerdem sind durchaus Roboter für die Raumfahrt in der Entwicklung, die auch klettern können:
http://www.dfki-bremen.de/robotik/fo...otik/scorpion/
http://www.dfki-bremen.de/robotik/fo...imber/details/
Ich habe den Scorpion einmal live gesehen und sowas wirst du als Hobby-Bastler erstmal nicht so schnell hinbekommen.
Nun zur Mechanik - Fangen wir mal beim Urschleim an:
Ein ungebundener Körper im 3d-Raum besitzt ja maximal 6 Freiheitsgrade, nämlich 3 Rotations- und 3 Translationsfreiheitsgrade. Wenn der Körper durch eine Bindung (Gelenk) irgendwo befestigt ist, ändert sich der Gesamt-Freiheitsgrad entsprechend der Anzahl der verbundenen Körper und den jeweiligen Freiheitsgraden in den Gelenken (Stichwort: Grüblersche Zwanglaufgleichung). Wenn also das Gesamtsystem F=6 hat, werden schon alle Bewegungsmöglichkeiten abgedeckt. Jede weitere Erhöhung des Gesamtfreiheitsgrades bringt keine neue Bewegungsmöglichkeit.
Für die Laufbewegung eines mehrbeinigen Roboters brauchst du aber bei weitem nicht so viele. Was nützt es dir z.B. wenn du den Aufsetzpunkt deines Fußes auf einer linearen Bahn erreichen kannst, wenn dasselbe genau so gut auf einer anderen Bahn möglich ist. Da jeder Freiheitsgrad (meistens) einen Antrieb entspricht, hast du dann folglich einen Haufen unütze Motoren, die dir nur zusätzliche Kosten, Gewicht und Steueraufwand bringen. Schon den Rotationsfreiheitsgrad um die untere Segment-Längsachse kann man ohne Probleme weglassen, wenn man nicht gerade einen unsymetrischen Fuss positionieren will (und davon war nicht die Rede).
Des weiteren kann man glaube ich sagen, je mehr Beine ein Roboter hat (bis zu einer bestimmten Grenze), desto geringer kann der Freiheitsgrad des Beines sein. z.B. kann sich ein Hexabot mit F=2 (heben/senken, vor/zurück) pro Bein schon gut fortbewegen.
Darüber lässt sich streiten.Zitat:
außerdem ein aspekt haben fast alle roboter mit der natur gemeinsam: das exoskelett!
Der menschliche Arm dient aber nicht der Fortbewegung sonder eher dazu das "Präzisionswerkzeug" Hand zu führen. Und insgesamt ist es durch den Arm möglich die Hand in allen 6 Freiheitsgraden im Raum zu positionieren.Zitat:
nimm dir einfach mal deinen arm als anschauungsobjekt, und zähl mal nach wie viele freiheiten dein arm hat (schulter bis handgelenk. ohne finger).
Das stimmt also so nicht. Es gibt auch nur Translations- und Rotationsfreiheitsgrade. Die meisten natürlichen Gelenke haben nur Rotationsmöglichkeiten.Zitat:
also ich für meinen teil zähle da 7 freiheiten. 5 knick-, und 2 drehfreiheiten.
Bein und Arm sind verschiedene Sachen, weil Beine ja hauptsächlich der Fortbewegung dienen. Das menschliche Bein hat grob gesagt eine Kugelgelenk zwischen Oberschenkel und Becken (f=3, u=3) und ein Drehgelenk zwischen Ober- und Unterschenkenkel (f=1,u=5). Ohne Fuß ist somit F=4.Zitat:
beim menschlichen bein ebenfalls
Das ist so nicht richtig. Auch hier muss man wieder die Randbedingungen sehen. Natürliche Gelenke (keine stoffschlüssigen) sind in vielen Belangen schlechter als technische. Sie besitzen z.B. keinen definierten Drehpunkt, sind unregelmäßig geformt, der Öffnungswinkel ist meist sehr begrenzt, Belastbarkeit und Reibung sind bei technischen Gelenken teilweise besser, usw. Das ist der Tatsache geschuldet, dass natürliche Gelenke wachsen müssen und nicht montiert werden können.Zitat:
was man aber dazusagen muß, ist das die natur bessere gelenke hervorbringt als wir in der robotermechanik herstellen bzw. nutzen können.
Aber die Natur kann sich das auch leisten, weil sie über sehr komplexe Regelungsmöglichkeiten verfügt (inkl. Sensoren, Aktuatoren). Das Ganze ist auch noch adaptiv, nachgiebig und robust.
So, genug rumgesülzt O:)
Eine Frage zum Schluss noch: Hast du Kenntnisse aus Lehre oder Studium oder Hobby, wie man Gelenke auslegt und konstruiert?
Ich möchte mal behaupten, mit der üblichen Modellbau-Vorhehensweise (Servo+Blech drum rum + Welle durch) wirste bei deinem Projekt nicht weit kommen.
Bei so vielen Freiheiten wird das Huckepack-Prinzip deiner Antriebe ein Problem werden.
Bevor du mit der Konstuktion beginnst, solltest du wenigstens die Antriebskräfte für die Extremlagen überschlagen und das grundlegende technische Konzept sollte klar sein.
Ich kann mir ungefähr ausmalen, was dass bedeutet und wünsche mal viel Spaß ;-)
Gruß,
Distel
Arm bis Hand bzw. Bein bis Fuss haben genau die gleichen Freiheitsgrade. Das liegt daran, dass beide ursprünglich der Fortbewegung dienten. Schulter bzw. Hüft haben drei Freiheitgrade, das Knie/Ellenbogen einen, und das Hand- und Fussgelenk zwei. Dazu kommt noch die Verdrehung von Elle und Speiche, also sieben je Extremität (alles drehgelenke).
Es gibt also im Bein wie auch im Arm eine Redundanz. Der zusätzliche Freihetsgrad ist sehr nützlich um die erwähnten limitierten Reichweiten der Gelenke auszugleichen und auch um zu verhindern, das die Extremitäten sich gegenseitig behindern.
Ohne diese Freiheitsgrade ist kein energiesparender Gang (beim Zweibeiner) möglich.
Schaut Euch doch alle aktuellen Roboter mal an. Die staksen, hoppeln, schwingen, und verbrauchen dabei Strom ohne Ende. Die Primitivroboter wie Robonova haben sogar nur fünf Servos pro Bein, weswegen der Roboter keine weichen Kurve laufen kann.
Zusammengefasst: Arm und Bein sind fast gleich. Redundanzen können sinnvoll sein und sogar Strom sparen. Und so lange wir Zweibeiner mit sechs oder weniger Gelenken bauen, werde wir auch nicht effizientes Gehen erleben.
Moin,
Du widersprichst dir selber. Die 6 Freiheitsgrade des menschlichen Beines sind klar. Elle und Speiche gibt es aber nur beim Arm und durch diese besondere Anordnung einen zusätzlichen Freiheitsgrad (ohne zusätzliches Gelenk).Zitat:
Arm bis Hand bzw. Bein bis Fuss haben genau die gleichen Freiheitsgrade. Das liegt daran, dass beide ursprünglich der Fortbewegung dienten. Schulter bzw. Hüft haben drei Freiheitgrade, das Knie/Ellenbogen einen, und das Hand- und Fussgelenk zwei. Dazu kommt noch die Verdrehung von Elle und Speiche, also sieben je Extremität
Es ist ein Trugschluss zu glauben, dass man für eine effiziente Fortbewegung möglichst viele Freiheitsgrade braucht. Elemente zur Energie-Zwischenspeicherung (z.B. Federn) wären da wichiger.
Des weiteren spielen bei der Fortbewegung auch andere Körperteile (v.a. die Wirbelsäule) eine wichtige Rolle, ohne die Höchstleistungen (auch im Bereich der Energieeffizienz) nicht möglich wären.
Nee. Wie beschrieben - siehe oben. Aber 6 Freiheitsgrade pro Bein sind beim Zweibeiner, glaub ich, ein Muss.Zitat:
Und so lange wir Zweibeiner mit sechs oder weniger Gelenken bauen, werde wir auch nicht effizientes Gehen erleben.
Außerdem soll ja auch kein Zweibeiner gebaut werden. Sondern irgendwas mit mehr Beinen. Da sollte man meiner Meinung nach (und der Meinung vieler anderer) nicht mit Gelenken übertreiben. Es bringt einfach keinen Vorteil für die Fortbewegung.
Gruß,
Distel
Meiner Meinung nach haben die Insekten es geschaft die Fortbewegung auf Beinen zu perfektionieren. In Relation zu ihrer Körpergrösse kommen sie leicht auf x100 Länge und 200x (EDIT: Wiesenschauzikade schafft sogar x400 die Körperhöhe) Höhe im Sprung. Selbst die Geschwindigkeit dürfte deutlich höher sein als die von bekannten Tieren. Was jedoch am meisten dafür spricht ist, dass diese Viecher nur sehr wenig Steuerleistung besitzen und einen sehr geringen Energieverbrauch haben.
Am klügsten ist es also sich die Beinchen der Insekten genau anzusehen und daraus die Anzahl der Gelenke und Freiheitsgrade zu extrapolieren.
Noe, ich hab mir nicht widersprochen. Im Bein heissen Elle und Speiche eben Schienbein und Wadenbein. Wenn diese beiden sich nicht gegeneinander verdrehen liessen, könntest Du z.B. nicht Motorrad fahren. Test: auf einen Stuhl setzen, Füsse flach auf den Boden, und dann die Zehen zueinander drehen. Also doch sieben Freiheitsgrade.
Es geht auch nicht darum, so viele Freiheiten wie möglich zu haben, sondern darum, das beim Menschen Arm und Bein fast gleich aufgebaut sind, und der 7. FG hier sinnvoll ist.
Bei Insektenbeinen ohne Fuss ist das natürlich ganz etwas anderes, da hast Du völlig recht. Da reichen drei Achsen pro Bein, das es keinen Fuss gibt, aber dafür braucht man mindestens vier Beine um laufen zu können.
Bei einem Hexapod kommt man dann mit zwei gelenken pro bein aus. Witzigerweise hat ein minimaler Zweibeiner genau so viele Gelenke wie ein minimal Vierbeiner oder sogar ein minimaler Sechsbeiner, nämlich 12.
Magie ;-)
Mit Schien- und Wadenbein haste natürlich recht. Mein Fehler.
Die Sache ist einfach die, dass AmyS3 argumentiert hat, so viele Freiheitsgrade pro Bein sind sinnvoll, weil der Mensch sie auch hat. Wie du aber bereits geschrieben hast, trifft das bei nem Zweibeiner zu, bein nem Vier- oder Sechsbeiner, braucht man aber pro Bein nicht so viele Freiheitsgrade.
Folglich ist ein Hexabot mit 7 Freiheitsgraden pro Bein, meiner Meinung nach, einfach unsinnig.
Gruß
Ja, da hast DU völlig Recht. Ich habe das wohl ein wenig zu sehr aus dem Zusammenhang gerissen betrachtet.
hallo alle zusammen,
ich frage mich immer noch nachdem ich das alles hier gelesen habe...wozu soll der bot denn gut sein??..er soll sich in mehrere teile aufteilen können, die sich autonom in der umgebung bewegen können und dann auch noch irgendwie über solarzellen zusätzlich energie einspeisen bzw aufladen??!...nun frage ich mich aber was ist denn wenn dir deine sechs beinchen in der umgebung auf pause schalten weil nix mehr mit strom ist? wie kommt denn dein body-bot an diese wieder ran?-oder willst du dann hinlaufen und helfen?
-also meiner bescheidenen meinung nach, ist das eine sehr kostspielige art seine irgendwie erworbenen ICs und chips mit 10-20k-euronen zu umbauen...aber das muß ja jeder selber wissen 8-[
Da würde ich persönlich also um einiges kleiner gestallten und mir quasi ne miniatur dieser idee bauen!! Würde dann pauschal nicht über 5k-euronen ansetzen und zeigt mir auch ob es machbar ist oder nicht...das teil könnte dann ja auch auf nen miniaturbaum klettern wenn ich schon sonst keinen weiteren sinn darin sehe :-k
die idee finde ich echt klasse, nur die dimension eines halben industrieroboters, oder was auch immer, in der gegend rum liegen zu sehen missfällt mir etwas arg.
mfg
HXPR
so ich bin auch mal wieder da :-)
sry das ich mich solange ned in meinem thread gemeldet hab und thx für das rege interesse!
ich möchte dabei etwas richtigstellen.
ich habe nicht 7 gelenke gewählt und dabei nur auf meine eigene anatomie oder die der tierwelt als maßstab genommen.
sonder ich habe mir ernsthaft gedanken darüber gemacht.
ich hab sogar schon mit dem gedanken gespielt mir son skelett ausm bio unterricht zu besorgen, und einfach einen "richtigen" arm funktionsfähig zu machen.
aber die idee hab ich wieder verworfen. .... vorerst...
was ich bisher nicht erwähnt habe, ist das sich das robobein aufgrund der vielen freiheiten sich ohne body autonom bewegen können soll, um z.b. einen body ohne beine anzusteuern und sozusagen sich selbst an dem body befestigen durch den body connector.
kleines fallbeispiel:
der roboter hat durch einen sturz (soll eigentlich nicht vorkommen) alle seine vorhandenen beine zerstört, und auch seine eigenen solarzellen geschrottet.
der body an sich funzt noch, jedoch kann sich nicht mehr selbständig bewegen oder seine accus aufladen.
der body stößt die defekten beine ab, geht in einen art standby und sendet via funk ein "beinrequest".
aus einem ersatzteil lager/kiste empfängt ein(oder mehrere) bein dieses signal, und macht sich selbsständig "auf den weg" zum body, und dockt sich an diesem an, und versorgt ihn mit dem strom von den bein solarzellen.
klingt vielleicht etwas utopisch, ist jedoch durchaus machbar.
außerdem möchte ich die möglichkeit haben mit dem bein einmal um den body "rumfassen" zu können, da ich mir auch vorstelle das an dem beinende das normalerweise den bodenkontakt hat zusätzliche tools angebracht werden können wie z.b. ein greifer, kamera oder ähnliches.
dann soll das bein sozusagen als arm fungieren.
an dem bodyconnector tüftel ich immernoch rum und überlege wie ich den am sinnvollsten gestalte.
die trennung soll übrigends von beiden seiten gehen also bein kann abkoppeln, und body kann abkoppeln.
als verbindungsstück wird eine art "zapfen" dienen, die entweder am body, bein, beiden oder garnicht drann ist.
also der soll halt nur als verbinder dienen wie beim lego die kleinen stecker mit denen man zwei "loch bausteine" miteinander verbinden kann.
hab grad kein bild bzw. son stecker zur hand.
der body selbst besteht nicht nur aus einem einzelnem rumpf, sondern ist eher eine runde scheibe, mit 4 oder mehr solcher connectoren um mehere "rümpfe" miteinander zu verbinden bzw. mit unbekannter anzahl beine ausgestattet werden, damit auch sehr komplexe bewegungen zu ermöglichen.
wie z.b. wie ein freeklimber "unter" einer felswand entlang zu klettern.
mein robi soll nicht einfach nur laufen können wie ein "normaler" hexa.
dann hätten pro bein ja 2-3 gelenke gereicht.
aber um um ein objekt herumzugreifen oder im "kamera arm modus" tief in eine felsspalte/loch/tunnel? hinein zu sehen braucht man halt mehr gelenke.
dabei würde aber der reifen für die ebene fortbewegung stören denke ich mal.
aber das kann man ja möglicherweise auch modular bewerkstelligen.
ist unter umständen schwer zu verstehen, aber ich tu mich immer ein wenig schwer das was sich mein krankes hirn ausdenkt in texte zu fassen.
p.s.: die chips die ich habe sind nur für einen prototypen gedacht.
so long AmyS3
hey AmyS3,
zu deinem connector fällt mir eigentlich nur dieser Stecker ein der so einen drehring mit drei bolzen drin hat --> ein dreifacher Bayonett-Verschluss , gibs auch mit gewinde, aber denke zum schnellen lösen bzw immer wieder taugt das nicht so. Darin könntest du dann alle möglichen anschlüsse verbinden du die brauchst, man muß den stecker eben nur groß genug dimensionieren, aber da sehe ich bei der größe deines bots keine probleme...allerdings sollte man vorher wissen was denn alles darüber übertragen wird, glaube bei dir war es j asowieso nur strom ??! aber dennoch sollte der stecker/connector einen gewissen durchmesser haben um auch als widerlager für spätere Schritte mit dem ganzen zuwirken.
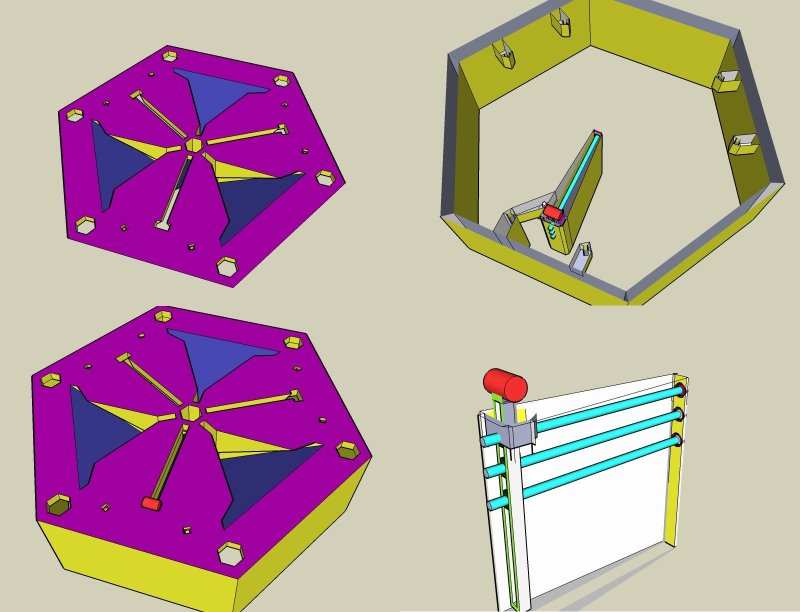
ich habe mal angefangen den body connector grafisch darzustellen.
ist noch nicht ganz fertig, aber mann kann sich schonmal nen bild davon machen.
das erste bild ist ein x-ray export von sketchup.
das runde teil darauf it eine art führungs zapfen, der ausgefahren werden kann, und bis zum ende seiner führungsbahn richtung mittelpunkt vom connector,
hingeschoben wird.
davon gibt es natürlich dann insgesamt 3.
an der mechanik dafür tüftel ich noch.
das zweite bild ist ein monochrom export mit nahaufnahme der gegenläufigen führungs lager (keine ahnung wie ich das nennen soll^^),
in denen die zapfen eingeführt werden.
naja guggt euch die bilders einfach mal an.
@klingon77: das währe doch grade für dich interessant.
EDIT: hier noch die sketchup datei wer weiter daran fummeln will :-)
hoppla das sketchup anhang hat er beim oberen post ned reingenommen.
dann hier einfach nochmal ^^
ach weils eine unbekannte endung war. ich sollte ein zip benutzen... lol
edit: hier nochmal ne x-ray nahaufnahme im farb modus. da kann man alles sehr gut erkennen.
hi,Zitat:
Zitat von AmyS3
prinzipiell ja, aber:
ich sehe da recht große Probleme.
Wenn Du sieben Gelenke an einem Bein möchtest, benötigst du mindestens 7 Motoren / Bein.
Bei nur sechs Beinen sind das 42 Motoren.
Für ein (von mir vorgeschlagenes Kugelgelenk) braucht man mindestens zwei Motoren, damit eine Bewegung in verschiedenen Achsen möglich ist.
Für den Body-Konnektor werden ebenfalls Motoren benötigt (autonomes Ankoppeln)
...macht dann mindestens 48 Motoren (ohne Kugelgelenke).
Um die Mechanik robust aufzubauen bedarf es einiges an Material.
Der Robby wird wahrscheinlich recht groß (hast Du ja schon geschrieben) und sehr schwer.
Mit dem Gewicht der Mechanik steigt das Gewicht der benötigten (starken) Motoren und ebenso der Energieversorgungseinheit.
Wenn Du mit einem Bein um den Körper rumgreifen möchtest, damit es dort eine Aktion ausführt impliziert dies, das Greifwerkzeuge vorhanden sind.
Zum Klettern sind Hände ebenfalls von Nöten (ich klettere selber; ich darf das also sagen)
Noch mehr Motoren, Lagerungen, Gewicht, Steuer- und Koordinationsprobleme im Gesamtkonzept.
Eine leicht gebaute Hexa-Mechanik kommt auf ca. 1,5 - 2,5 Kg.
Dein Projekt sehe ich im Gewichtsbereich mit dem Faktor 5 bis 15.
Du möchtest viele sehr anspruchsvolle Techniken in Deinem sehr umfangreichen Projekt vereinen.
* Beine mit 7 Freiheitsgraden incl. deren Programmierung, damit die vielen Gelenke auch sinnvoll zusammenarbeiten.
* Greifer/Hände?
* Autonome Montage/Demontage
* Um die Beweglichkeit der Beine in entsprechend unebenen Gelände zu Nutzen wäre evtl. eine Stereo-Bilderkennung / -verarbeitung sinnvoll?
* Hohe mech. Stabilität und Steifigkeit (wegen der zu erwartenden Hebelarme und des Gewichtes)
Dies sind nur einige Punkte, die mir einfallen.
Bezüglich des Body-Konnektors habe ich noch nicht ganz durchgeblickt, wie er funktionieren soll...
Wie wäre es mit einer zentrischen Schraube mit Führungsbolzen?
Das Schraubgewinde greift erst, wenn der Führungsbolzen an der Schraube in der Führungsbohrung hinter der Mutter eingeführt ist.
Dadurch könnte man ein verkanten der Schraube in der Mutter umgehen.
Der Führungsbolzen vor dem Schraubgewinde darf dann natürlich auch nicht größer sein, als der Kerndurchmesser des Schraubgewindes.
Eine entsprechende Baulänge lässt sich dadurch natürlich nicht vermeiden.
Eine andere Möglichkeit wären z.B: Exzenter, Bajonettverschluß oder ein Kegel welcher durch eine Schraube in die Hülse gezogen und gehalten wird. Ähnlich wie ein Bohrfutterkegel an einer Werkzeugmaschine.
Gewinde auf dem Konus und einer Kegelhülse wäre evtl. auch noch eine Möglichkeit. Da kenne ich mich aber nicht aus; habe noch nicht damit gearbeitet.
Bei der von Dir gezeichneten Option des Body-Konnektors fällt mir auf, daß die scharfen Innenkanten nur sehr schwer gefertigt werden können (z.B: durch Drahterodieren und mehrmaliges Umspannen des Werkstückes im dreidimensionalen Raum mit einem Innenradius im 1/100mm Bereich).
Alternativ dazu müsste man den Konnektor aus mehreren Einzelteilen zusammensetzen, was die Sache dann wieder weniger stabil und gleich viel teurer macht.
zuversichtliche Grüße,
Klingon77
AmyS3 - ein sagenhaftes Projekt, alle Achtung.
Zitat:
Zitat von ähM_Key
Ich glaub die Leute vom JPL setzen so etwas, hmmmm - deutlich ? höher an. Selbst wenn das Bein wesentlich kleiner werden sollte. Aber das JPL hat´s ja auch . . . .Zitat:
Zitat von AmyS3
@Furtion,
Hast Du schon bei ARM nachgeguckt? Ich glaube neuere Cores machen das. Hab ich jedenfalls auf einem Tisch mal "rumliegen" gesehen.Zitat:
... 400Mhz Prozessoren wo? <--need ...
@oberallgeier: thx! aber stimmt schon jpl hats ja.. :-)
@furtion: gugg dich mal bei http://freescale.com um.
bei denen hab ich meine meisten chips her. die schicken dir kostenlose samples nach hause.
@klingon77: das mit deiner gewichtsvorraussage stimmt schon.
ich habe ca. 20-30Kg eingeplant.
bei den scharfen kanten hast du auch recht. aber ich bin nicht so gut mit dem umgang von dem programm, und hab auch sonst nicht viel ahnung wie ich das am besten umsetzte.
aber gugg dir mal die version 2 hier an.
ich kann dir auch gerne ein autocad 3d modell exportieren.
vielleicht kannst du damit eher was anfangen.
anbei nochmal eine neuer sketchup datei bei der ich angefangen habe die mechanik einzuzeichnen.
bei dem "hebel" sind 2 der stangen für den vortrieb gedacht, und die mittlere für die hub bewegung.
hei nen overview davon.
hi,
ich habe mal versucht nen ganz einfachen bayonettverschluß zu zeichnen, soetwas in der art findet man an jeder CD/DVD-Rohlingspindel da eben nur flach, du bräuchtest aber einen auf einem Durchmesser was die zeichnung hoffentlich zeigt
mfg
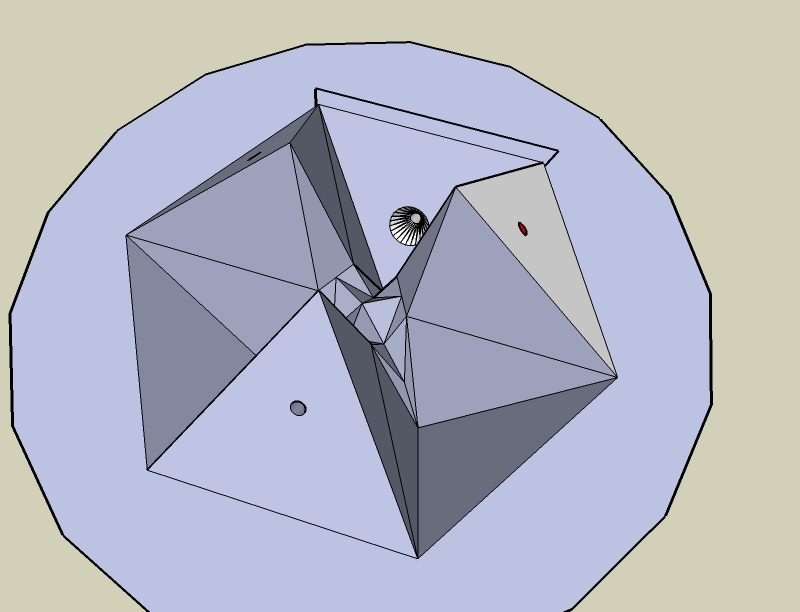
ich habe mir noch eine andere art von verbindung überlegt.
wo drei bolzen nach aussen gedrückt werden.
ist sicherlich stabiler als die vorherige variante und einfacher umzusetzen.
und bild... tadaaa...
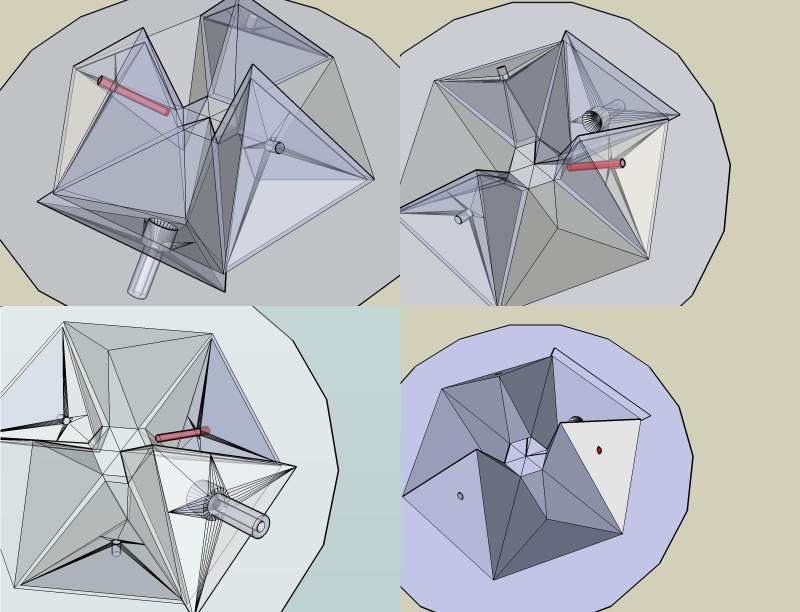
noch ein bild mit einer erweiterten geometrie.
@AmyS3 du schreibst da was von stabiler und von einfacher umzusetzten. Da will ich doch gleich mal einhaken. Stabiler: Hast du den mal die Kräfte ausgerechnet die in deiner "Verbindung" auftretten bzw. die diese aushalten muss. Also Momente und Kräfte ausgerechnet und in Relation zur Materialstärke genommen? Wenn du schon so aufwendig bauen willst, dann sollte man auch konstruktiv richtig arbeiten.
Einfacher umzusetzten? Die Teile sehen für micht nach fiesen CNC Teilen aus. die Müssen komplett aus einem Klotz (oder von mir aus auch Zylinder) gefräst werden. Ich kenn jetzt die Abmessungen nicht, aber ich vermute dass die Fertigung dieses Teils schon deutlich über 100 kosten kann.
Außerdem vermute ich, dass der Konektor nur unter sehr idealen Bedingungen schliesst. Besser ist hier ein selbstzentrierendes und selbstausrichtendes System.
Nachdem ich dich schon nicht abbringen kann die Idee zu realisieren, dann kann ich vielleicht solange rummeckern, dass sie danach auch funktioniert :-P
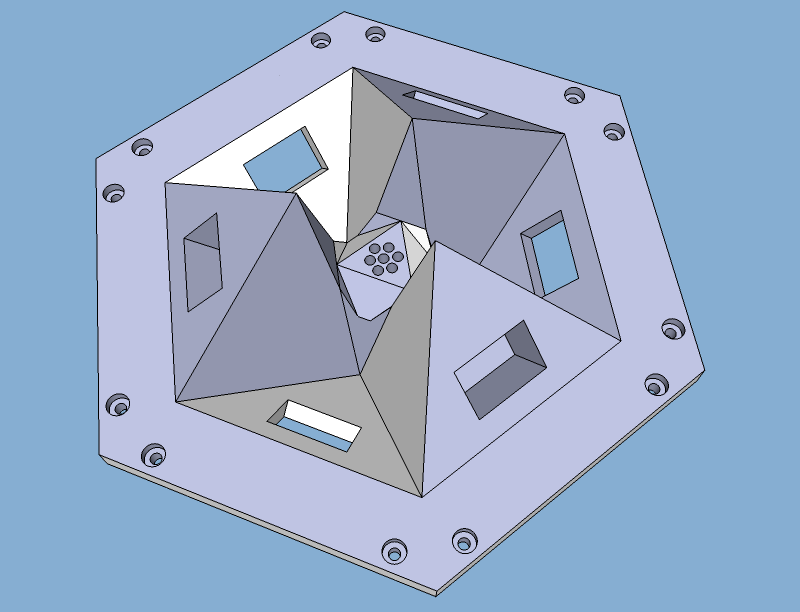
ich habe die sache nochmal etwas weitergesponnen, und ein idealeres gehäuse gezichnet. das sollte mit einer cnc machbar sein, und sollte auch gut was aushalten.
Hi AmyS3,
ich muß mich leider der Meinung von HannoHupmann anschliessen, denn bei deinem Bot werden Kräfte auftretten denen du anscheinend in keiner weise Rechnung trägst. Auch denke ich sind deine Haltebolzen die du in der aktuellen Ansicht zwar nicht mehr drin hast, aber eben weiter oben, ziemlich dünn. Besser wäre hier wohl eine Art Klaue oder Hacken der das ganze zu sich hin zieht also zusammen zieht und somit festhält. Dafür könnten sich diese Aussparungen jedenfalls schon mal eignen. Das ganze dann noch mit Federkraft in eine Position arretiert werden die nur durch z.B. einem Hydraulik-/Pneumatikzylinder zu entriegeln ist, wegen dem auch mal stromloss sein und so, aber auch nur schon mal so nebenbei gefragt wohin soll eigentlich die ganze Mechanik dafür besonders später am Bein :-k
Was denkst du denn über einen Bayonettverschluß, wenn du in etwa annimmst das der etwa 200mm im Durchmesser hat dann könnte man noch mehr Arretierpunkte benutzen...um eine Selbstführung zu realisieren wäre ein flache Ausführung vielleicht doch besser, die dann quasie eine kurze trichterförmige Öffnung hat. Und du bräuchtest nur jeweils eine Mechanik zum drehen und sichern.
Aber ich frage mich wirklich warum dieser Connector "vergoldet" werden muß, soll heißen das es sicherlich einfacher geht, wesentlich günstiger und trotzdem funktioniert...ohne das rad komplett neu zu erfinden
Mahlzeit,
Manomanoman, wenn ich dass sehe, kann ich mich meinen Vorrednern wirklich nur anschließen. Und weil ich ein Freund drastischer Worte bin, sag ich es mal so: Das Ding ist konstruktiv ein großer Haufen Schweinescheiße. ](*,)
Bitte nicht beleidigt sein - ist aber so. O:)
Das Teil wird weder so funktionieren wie du es dir wünscht, noch ist es fertigungstechnisch machbar und schon gar nicht sinnvoll.
Ein weiteres Problem ist, dass du anscheinend nicht viel von Konstruktion verstehst und überhaupt keine Ahnung hast, wie sowas abläuft und was man beachten muss. Deswegen kann man dir auch schlecht gute Ratschläge erteilen. Eigentlich nur einen: Mach dich erstmal ein bischen darüber schlau - es gibt z.B. Bücher über sowas.
Bevor man ein 3d Zeichenprogramm anwirft, ist es wirklich empfehlenswert erstmal anhand einer Prinzipskizze eine Überschlagsrechnung zu machen. Anschließend kann man sich auf einen Blatt Papier ein paar Gedanken zur konstruktiven Ausführung der Teile machen. Das kannst du den Technikern und Ingenieuren unter uns definiv glauben.
So, ich bin dann mal weg ...
Gruß,
Distel
Ich wage sogar zu bezweiflen, dass man nen CNC Werker findet der sowas fertigen würde. Sowas geht dann nur noch bei ein paar Spezialisten und einmal verkantet und den Flansch braucht man neu. Vermutlich hast du auch keine Toleranzen eingeplant oder ähnliches.
Also entweder du machst es richtig oder ich seh keinen Sinn mehr darin mir die Finger wund zu tippen und hier Tipps in den Wind zu schreiben. Aber was ich da sehe tut mir in der ganzen Bastler und Ingenieurseele weh.