vielen dank für die schnelle antwort :D
jetzt funkt alles \:D/
THX
Simon

Druckbare Version
vielen dank für die schnelle antwort :D
jetzt funkt alles \:D/
THX
Simon
hei bin ebenfalls neu, so wie simon!!
habe ein paar fragen:
ist das der richtige transistor??
http://at.farnell.com/9946454/halble...CTRONICS-BD679
welche motoren sollte ich verwenden + wo krieg ich die her??
[-o<
hi,
@ Lehrling1 also ich würd jetzt mal sagen, dass es die richtigen transistoren sind und zu den motoren mmh.. schraub doch einfach nen kleines spielzeugauto auseinander^^
so hab auch noch ne frage und zwar hab ich da jetzt noch bissel dran rumprobiert und möcht jetzt mit ner fernsteuerung zwei schalter schließen und öffnen können (zwei seperate schalter; einen zum an und ausschalten der lampe und einen damit der bot vorwärts und rückwärts fährt)
Hab im Forum schon bissel gesucht und auch gegoogelt aber nicht das passende gefunden
hab viel über IC's und so gelesen würde mich aber sehr freuen wenn mir wieder jemand helfen könnte^^ (wie bau ich das selber oder wo kann ich mir so was kaufen, so günstig wie möglich wenns geht ;-))
THX im voraus
Simon
danke dir simon !!!
Haben in der Firma schon Servomotoren bestellen lassen ... kostet nicht viel.
Danke für die schnelle antwort.
mfg.
Lehrling1
Hallo ich bins nochmal mit einer Frage:
Auf welchen Wert soll ich die Poti's trimmen ???
Wenn ich eine Spannung von 7V habe ??
mfg.
Lehrling1
Das geht am einfachsten in dem du ausprobierst.Zitat:
Auf welchen Wert soll ich die Poti's trimmen ???
Im Prinzip funzt die Schaltung so :
Wenn einer der LDRS von der dunklen Linie, der der Bot folgen soll, ab kommt und stattdessen über dem helleren Boden steht, bekommt der mehr Licht ab, d.h. er wird niederohmiger.
Dadurch kommt mehr Spannung an der Basis vom Transistor an, der lässt deshalb mehr Strom zwischen Kollektor und Emitter fließen (der Transistor wird niederohmiger), dadurch dreht der Motor auf der Seite schneller.
Der Bot dreht sich dann solange leicht in die eine Richtung bis der LDR wieder über der Linie ist.
Über die Potis kannste dabei einstellen wie empfindlich das ganze ist.
Also welcher Helligkeitswert als 'Linie' und welcher als 'neben der Linie' gewertet wird.
Das funktioniert indem das Poti einen teil der Spannung hinter dem LDR nach Masse 'abzweigt'.
Lange Rede kurzer Sinn :
Du musst die Potis also so einstellen, das die Motor ungefähr gleichschnell sind wenn der Bot,d.h. die LDRS auf der Linie ist und der Motor auf der richtigen Seite schneller läuft wenn du von der Linie runter kommst.
Ich hoff ich hab mich verständlich ausgedrückt, konnte dir helfen ^^
Übrigens, nur weil sich auf der ersten Seite Leute wundern, dass das so einfach geht.
Ich hab früher immer die Robotorbausätze vom C. zu Weihnachten bekommen.
(So ein komisches 6 beiniges Teil, das Wänden ausweicht, und so ein dreibeiniges Vieh, was bei licht oder Schall wegkrabbelt.)
Und die waren der Einfachtheit halber immer ohne microcontroller aufgebaut.
Und wenn das funktioniet, is das doch schlicht und elegant gelöst.
Sebastian
danke Sebastian ... somit hast du uns sehr geholfen DANKE!
mfg.
Lehrling1
Hi
Ich bin neu hier und ich wollte auch so einen Roboter bauen!
Mein Roboter soll allerdings einem schwarzen streifen folgen und das äußere soll weiß sein. Was muss ich da beachten wenn ich die Farben tauschen??
Hast du vllt ne stückliste was du alles genau genommen hast an Bauteile das wäre echt super!
Hi,
also wenn du auf der zweiten seite geschaut hättest, müsstest du jetzt nicht fragen^^
hier is die Stückliste von vorne:
Für 2 Motoren (Rechts - Links):
2x 1/4W 2,2K
2x 1/4W 1,0K
2x PT 6-L 5,0K
2x LDR 07
2x BD 679
+ die Motoren dann halt
Da kannste es bestellen: www.reichelt.de
zu deiner Frage mit den Farben kann ich dir leider nich helfen bin auch ein Anfänger :)
Hi ich habe solch einen Bauplan der Name des Bausatzes is "Spürhund" und hat einen Modus bei dem er der weißen linie folgt und einen modus in dem er dem Licht (wird als Motte bezeichnet) hinterherfährt. Was ich bei diesem Model hier nicht verstehe ist das die Hinterachse mit beiden motoren verbunden ist. Wie soll das gehen?! ich habe mir zwar das video angeschau aber es werden ja normal beide räder gedreht wenn sie an einer achse sind?! wie soll dadurch die rechts oder links bewegung entstehen?!
Gruß Samuel
PS: schreib euch mal morgen ne genau stückliste und die schaltung dieses models.
Nun erst mal ausschlafen für die englschprüfung morgen :P
@Roboter2008
Bin zwar auch nur ein Noob, aber wenn ich Sternthaler richtig verstanden habe kann man:
a) LDRs wählen die andersherum funktionieren
b) die Schaltung umstellen dass jeweils der andere LDR für den Motor verantwortlich ist
Also MotorR+ an E2 und MotorL+ an E1
Stimmt das soweit?
Ich bin mir da gerade nicht sicher! @ aphexZero ob das so geht wie du das sagst! denn durch das weiß wird das licht das die lampe ausstrahlt reflektiert! und nur so schalten die LDRs. Bei schwarz jedoch ist die reflektion nicht ausrechend. Kp ob des stimmt was ich sag. des ist halt meine theorie!
morgen matheprüfung dann ist es vorbei :)
Hallo
Die Räder sind drehbar an der Achse befestigt und werden mit dem Gummi vom jeweiligen Motor angetrieben.Zitat:
Was ich bei diesem Model hier nicht verstehe ist das die Hinterachse mit beiden motoren verbunden ist.
Für einen weisen Strich könnte man vielleicht den LDR und den 2k2 tauschen:
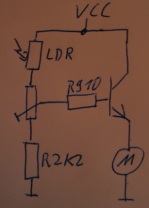
Wenn dann der LDR über dem schwarzen Bereich weniger Licht erhält wird er hochohmiger, der Transistor steuert mehr durch und der Motor beschleunigt.
Gruß
mic
Okay, verstehe was du meinst.
Aber die LDRs "schalten" ja nicht, das geht ja quasi fließend.
Zitat:
Das Lämpchen hilft den LDR's, zu "sehen", also wenn ich es ausschraube dann fährt er nicht dem Strich entlang.
Je stärker der Licht/Schatten-Kontrast ist, desto schneller ändert sich der Widerstand.Zitat:
Wie reagiert den Bot wen der Boden stark reflektiert?
Nicht gut =) Wenn ich ihn drausen fahren lasse, reagiern die Sensoren nicht so stark, man sollte es schon drinnen machen ! Im Dunkeln funktionierts sehr gut, aber wenn der Boden reflektiert klappts nicht.
Vielleicht muss man auch 2 Lichtquellen nehmen und ein paar "Schatten"-Blenden anbringen.
Wichtig ist ja nur das ein LDR weniger Licht abbekommt als der andere.
Möglicherweise ist das ein völliger Blödsinn was ich hier von mir gebe, aber ich lese mich ja auch gerade erst ein.
Ich stell mir das so vor:
Wenn ich die LDRs mit Pappe abschirme (rechts/links daneben) fährt das Ding ein bischen ZickZack - wenn ich die Pappe weiter auseinander anbringe wird der Weg geradliniger.
Sorry an alle für die das nur Anfängergeschwätz ist - ich versuch mich halt gerade in das Thema einzuarbeiten. :-k
PS: viel Glück bei Mathe!!!
Hallo
Das stimmt ja nun nicht. Mit den Potis stellt man die Motorpower bei einer bestimmten Beleuchtung ein. Weniger Helligkeit könnte man mit dem Poti ausgleichen, aber dann würd man nicht in Strichmitte fahren und unsymetrisch korrigieren. Optimal wäre gleiche Leistung an beiden Motoren bei gleicher Helligkeit.Zitat:
Wichtig ist ja nur das ein LDR weniger Licht abbekommt als der andere.
Man könnte auch nur einen Motor regeln und den Anderen dauerhaft etwas abbremsen (das Birnchen in Reihe?). Dann könnte man an einer Kante entlangfahren.
Gruß
mic
Hab mich vielleicht falsch ausgedrückt...
Ich meinte damit dass ein LDR weniger Licht bekommt damit was passiert.
Also - wie der TE meinte - Licht aus geradeaus.
Ich würde also die Potis bei "Lampe-Aus" einstellen damit das Ding geradeaus fährt.
Wenn _dann_ ein LDR weniger Licht bekommt... etc.
Hey, feine Sache, so simple schön \:D/
Erinnert mich n bischen an Werken früher in der Schule :)
Gruß Andreas
@Roboter2008
falls du nicht schon die Lösung von radbruch benutzt, ist es auch einfach möglich nur die Motoren zu tauschen.
Es reicht somit aus, dass nur die beiden Drähte von den beiden identischen Schaltungen, halt 'den anderen' Motor steuern. Masseleitung der Motoren bleibt wo sie ist.
Gruß Sternthaler
Das erschien mir zu simpel, war aber auch mein erster Gedanke.Zitat:
ist es auch einfach möglich nur die Motoren zu tauschen.
Das meinte ich ja...
b) die Schaltung umstellen dass jeweils der andere LDR für den Motor verantwortlich ist
Also MotorR+ an E2 und MotorL+ an E1
geht das oder nicht?
DELETED
'tschuldigt... nicht gesehen, dass es 3 Seiten gibt ...
PS: Wieso gibts hier keine lösch-funktion?!?
Es freut mich sehr, dass viele Freude an diesem Roboter finden =)
so mein roboter ist nun auch bald fertig :) das mit der festen achse wäre natürlich auch eine möglichleit gewesen... hab mir aber mal wieder die kompliziertere variante rausgesucht. und ist nun auch ein weißer strich geworden :P... hät ichs vorher gewusst das es andersrum geht hät ichs vllt auch so gemacht. aber nun hab ich schon die platine gelötet. dafür hab ich aber ne LED als lampe... mal schaun obs auch fährt...
Hoffentlich gibt mein Traktor :D ne 1 :D
Ich lad nachher ma noch ein paar Bilder hoch :)
Gruß Schoko
Es geeeeeeht nicht!!! Heute ist abgabetag! und es geeeeeeeeeht nicht. Es fährt nur geradeaus. beide motoren laufen immer gleichstark. egal was ich an den podis auch mache. auf die LDRs reagieren die motoren nicht. kein bisschen. Aba die LDRs gehen am messgerät Lampe geht so wie es soll und die schalter auch. transistoren sind dann normal auch richtig drin. sonst würd sich ja gar nichts mehr tun?!? vllt habe ich die podis falsch angeschlossen.... weil durch regel passiert auch nichts. wiederstände stimmen auch auf jedenfall. oh man... mal schaun...
Gruß Samuel
Soooo ich hab nu doch ne 1 :P mein fehler war, das die leistungstransistoren ja andere anschlussbeinchen haben und ich die falsch angescheschlossen habe. des soll ich nun über die Ferien beheben da diese natürlich kaputt gegangen sind...
Hier sind nun mal ein paar vorher nachher Bilder von meinem Fahrzeug. wobei ich leider kein ganzes Bild mehr habe wie es davor aussah. und die Fotos sind auch nur von schlechter qualität da ich nur mit dem handy bis jetzt fotografiert habe.
und das ganze ist aus nem alten spielzeug... :P
hier noch eins :P
Sorry, dass ich ein so alten Thread wieder auskram, aber das Bild will nicht :(
Wow diesen einfachen Roboter find ich super villeicht bau ich mir demnächst auch einen. Hab noch ein paar Teile rumfahren die ich dafür verwenden kann =P~
Wow... wie lagerst du deine Teile, dass sie rumfahren? :DZitat:
Zitat von Panzerfan
Naja ich hab mer halt ein altes ferngesteuertes Auto genommen und meine Teile draufgesetzt. Nein Spaß beiseite, ich hab so ne Kiste in der aller möglicher Elektronikkruscht ist den ich noch mal verwenden könnte und da hab ich noch ein paar Ldrs und alles mögliche. Außerdem siehts in meinem Zimmer ziemlich chaotisch aus da könnte noch irgendwo in einer Ecke was rumliegen. Mal schaun
Hehe, ich habe neulich auch ca die Haelfte meiner Teile in eine Datenbank einpflegt. Am Ende sagte diese: Gesamtwert der Teile 495 Euro ;)
mal ne idee für eine gute teile lagerung^^:
man setzt alle bauteile an einen faden (mit klammer oder so), spannt diesen faden quer durchs ganze zimmer und lässt ihn dann noch von einem servo rotieren... fänd ich ganz nett, aber da muss man schon was austüfteln, den faden zu bewegen, ohne dass die Bauteile auf den Rollen landen,,,,
Lol. Weisst du dass bestimmte Teile nicht auf Luftfeuchtigkeit stehen? Ich persoenlich stehe auch nicht auf Spinnweben am TQFP, Fliegenschiss am 20 Euro teuren Chip und einen QFN finde ich nie wieder, wenn das Ding runter faellt. Abgesehen vom Servo, was nervt, viel Strom zieht und nach etwas Dauerbetrieb durch ist. :roll:
mal ne frage wo bekommt man denn kleingetriebemotoren 5V-12V
www.gidf.de
Bei amazon gibt es den Duden fuer 22 Euro.
Raaaahhhh,
gidf ist ja der Hammer ;-). Ich liebe gelbe Männchen!
Schöne Weihnachten und einen guten Rutsch ins Neue Jahr
wünscht euch allen
Sternthaler
Ich finde diese Idee super
Aber was denn der Roboter jetzt genau
MFG FredWeise
Hi,Zitat:
Ich finde diese Idee super
Aber was denn der Roboter jetzt genau
MFG FredWeise
ja super und Roboter sehr genau.
MFG (mit frechem Grinsen),
vohopri
PS:
Wenn du etwas bestimmtes wissen willst, dann könntest du deine Frage auch hinschreiben.
Bei manchen Postings (NEIIIIN - nicht Deinem) habe ich den Eindruck, dass die von einem mehr, eher weniger guten KI-Programm (wie ELIZA, aber deutlich schlechter) stammen. Mit gaaanz früher Rechtschreibung taiwanesischer Bedienungsanleitungen.Zitat:
Zitat von vohopri
ÄHHMMMM
Ich meine was kann der Robotor jetzt genau
MFG FredWeise