Ist Sasch der mit diesem Bot?
jon

Druckbare Version
Ist Sasch der mit diesem Bot?
jon
Hi,
nein, das ist der Bot von Numberfive, oder ?
P.S: Bilder schicke ich dir diese Woche ;)
Viele Grüße
Hallo
danke für die bisherigen Fotos!
@Klingon
Hatte deinen Kommentar gestern nicht mehr gesehen.
Stimmt, wenn man streng kalkulatorisch an die Sache rangeht,
liegen die ~Materialkosten die zum schlussendlichen Ergebnis führen, bei reinem SelfMade bei +-1 EUR pro Stunde.
Aber die wirklichen Entwicklungskosten bei Neuentwicklungen sind schwerer zu fassen ...
..weil man die Summe der Erfolge leider auch an der Summe der Fehlschäge messen kann.
Baue gerade weitere Roboter und folglich neue Fahrgestelle.
Mittlerweile kann ich das Rechenspiel anders angehen.
Muss jetzt nur noch Material rechnen, weil ich jetzt (wie andere auch) auf die Pläne der Vorgängerversion zurückgreifen kann.
So bleibt gegenüber der vorherigen Rechnung etwas an Zeit und Geld über. Das möchte ich in Zukunft in Dampf investieren.
Also auch Ressourcen (wie Mechaniker ;-) ) einkaufen oder fremde Entwicklungen unterstützen um alles ein wenig zu beschleunigen.
(Soweit der Plan)
---
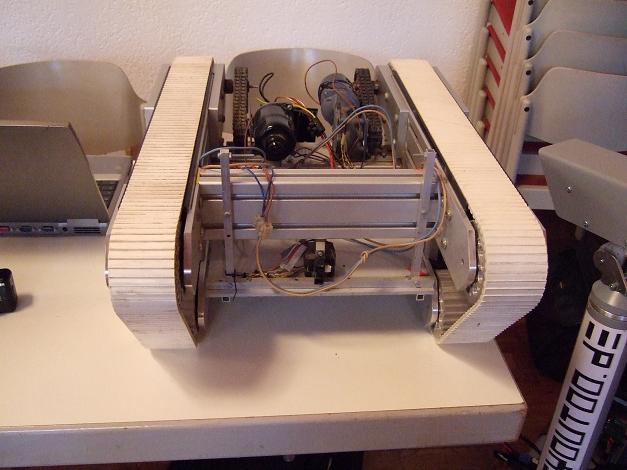
Der Bot auf dem Foto ist von NumberFive.
Ist auch ein funktionierender Eigenbau mit zahnriemenähnlichen Ketten!
Sasch baut was ähnliches wie CYOUTOO aber schneller Externes Bild anzeigen .
Beste Grüße,
Christian
UlrichC was zieht dein Embedded System also der PC an Strom? Bzw. wie versorgst du deinen Roboter mit Power vermutlich über BleiAkkus oder?
Hi,
Hst du Bilder von Saschs Roboter ? (oder Sasch). Die Bilder von Cyoutoo habe ich dir per E-Mail geschickt.
Viele Grüße
Der eingebaute Computer kann mit den derzeit verwendeten Blei-Gehl-Akkus ca. 8 Stunden alleine arbeiten.
Wieviel Ampere der Computer genau zieht habe ich mal gemessen aber auch wieder vergessen ... ich mess am WE nochmal nach ... wenn ich es nicht vergesse ;-)
Der Computer ist übrigens aus handelsüblichen Bauteilen (günstig) konfektioniert worden:
http://www.ulrichc.de/project/cu-emb.../index_de.html
Danke auch für deine Bilder Minimum!
Von Sasch`s Roboter gibt es glaub ich noch keine Bilder.
Er hat soweit ich weiß erst vor kurzem wieder neu mit dem Fahrgestell angefangen.
Gruß,
Christian
Meine Bilder sollten auch schon da sein!
jon
Hi,
@jon, deine Bilder sind auch schon da ;) siehe Seite 2 ;)
Viele Grüße
Ups...
Hab ich beim Überfliegen nicht gesehen. :oops:
Noch ne frage:
Warum hast du, Ulrich, erst über cyoutoo auf c.ulrich.de, dann auf cyoutoo.de und jetzt wieder auf ulrichc.de berichtet??
Ich kann dahinter keine Logik finden.
jon
Hi,
er hat glaube ich das design usw. auf cyoutoo.de geändert, derweil hat er auf ulrichc.de weiter geschrieben.Jetzt wird die seite wieder neu "bearbeitet". Wenn du auf cyoutoo.de auf die Kategorie Videos klickst kommt die Meldung das die Seite im umbau ist ;)
Also so denke ich das ;) Vllt. ist es auch ganz anders.
Viele Grüße
Hallo zusammen und vielen Dank nochmals für die Bilder Jon und minimum :) !
Ja das mit den Webseiten ist nicht so einfach.
Ursprünglich wollte ich das Projekt einfach auf einer eigenen Seite haben.
Aber mittlerweile gibt es andere Ideen.
Die Inhalte der Seiten werden sich ändern.
Es wird beides noch für den Roboter sein, nur das CYouToo.de wird eher was für Leute die mit Robotern weniger was zu tun haben.
So eine Art Informationsseite.
Die andere Projektseite wird sehr technisch ausgelegt werden.
Ich will das jetzt so auftrennen, weil es komisch sein muß für Leute ohne PC oder andere Technikkenntnise die jetzige Seite zu lesen.
Ist eigentlich nur ein Versuch.
... will mal was anderes ausprobieren ;-)
Beste Grüße
Christian
PS: Den Stromverbrauch vom Computer hab ich noch nicht gemessen (vergessen)
Mess dann später nochmal nach.
Hallo nochmal,
habe es jetzt nochmal gemessen.
Externes Bild anzeigen
Momentan liegt die Leistungsaufnahme des Computers bei 1,5 bis kurz vor 2 Ampere.
Ich schätze das kann man noch verbessern.
Es ist gerade W2000 (Standardinstallation) drauf.
Werde vielleicht mal alle nicht benötigten IOs ausschalten usw.
Die derzeitigen 1,4 Ghz könnten auf auf die hälfte getaktet werden.
.. mal schauen.
Momentan muss das alles aber nicht sein, weil der Roboter sowieso länger durchhält als mein Laptop.
Zu Hause wo das Fahrwerk nur wenig eingestzt wird, hält der Akku acht Stunden durch.
Drausen weiß ich noch nicht genau, weil ich dort bisher überwiegend testfahrten unternehme.
...Habe es noch nicht geschaft den Roboter leer zu fahren.
Die NiMH-Akkulösung:
Externes Bild anzeigen
... wurde als Alternative getestet ... und hält deutlich länger, aber wird vermutlich in einen anderen Roboter Verwendung finden.
Denn mit Blei ist einiges einfacher.
Grüße
Christian
Wie lange dauert es, die ganzen NiMh Akkus zu laden??
Wie viel Ah haben nochmal deine Blei-Akkus?
jon
Hi,
soviel Ah haben die Akkus:
Viele GrüßeZitat:
Zitat von UlrichC
Die NiMH muss ich leider einzeln (Packweise) laden das dauert dann je nach Ladeprogamm bis zu zwei Stunden pro Akkupack.
Die 24 Volt 24 Ah Blei laden mit einem einfachen 5 Ampere-Lader bis zu 10 Stunden. De Akkus können auch während dem Betrieb geladen werden können ... dauert dann etwas länger, aber stört nicht weiter.
Gruß
Christian
@minimum :)
Die Blei wiegen glaub ich nur 20 Kg muss ich mal neu wiegen.
(Wieder was, das ich vergessen habe O:) )
Frage deswegen weil ich für mein Mainboard am Roboter dieses hier verwenden will Klich mich
Da hier der Stromverbrauch sehr viel gerninger ist als bei standart komponenten, bereits entsprechendes Stromversorgung möglich (kein eigener Trafo mehr) und ausreichen IO anschlüsse zur Verfügung stehen.
Hauptsächlich den rechenintensiventeil soll dieses Board übernehmen.
@ hanno , ist das wirklich ein kompletter minipc
den ich dann mit software und betriebssystem wie mein heimpc bespielen kann ?
ich seh da auch keine weiteren infos, vieleicht weil ich nicht eingeloggt bin ^^
Gruß
Richtig, deine Wahl braucht sicherlich nicht so viel Strom wie mein PC (falls du das meintest).
Aber deine Wahl enthält auch standart komponenten. Die Embedded von heute sind oft die PCs von gestern. Wie sonst kommt ein 233 Mhz Controller heute nochmal auf eine Platine.
Für mich wäre das aber nix.
Ich brauche die 1,4 Ghz Rechnerleistung den erweiterbaren Speicher und nahezu alle IOs inc. Festplatte usw. meines Standard PCs
Mittlerweile gibt es da noch leistungsfähigere und stromsparendere Systeme auf Standard-Basis.
Nunja, so ein PC-System ist eben fast schon veraltet sobald es eingebaut ist ^^.
Aber gut, das du auch den Schritt vom MC weg wagst um auch was anderes auszuprobieren.
Mit den Stromrechnungen würde ich an deiner Stelle warten bis alles angeschlossen und im Betrieb am Amperemesser hängt.
Denn ein Board alleine macht noch keinen hohen Stromverbrauch.
Gruß
Christian
PS: Nettes Feature an meinem Roboter aufgrund der Wäremleistung und dem Umluftsystem usw.
Der Roboter ist immer Handwarm... also kein kalter Blechkasten :-)
EDIT: Für die jenigen die ein normales Betriebssystem auf ihrem Roboter spielen möchten. Gibt es Systeme die ähnlich wie ein Standard-PC aufgebaut sind und sich auch in einem Roboter gut machen ... Suchbegriff: Mini-ITX
ja die mini itx boards kenn ich aus dem CarPc bereich, vor allem die Epias , ist da aber nicht zuviel des guten ?
Vor allem wenn dan nuch Festplatten dazu kommen, beißt sich das nicht mit der Geländetauglichkeit des Kettenbots ?
Gruß
Zuviel des Guten weiß ich nicht.
Das ist zum großen Teil ermessenssache.
Auch kommt es natürlich ganz darauf an was man damit tun möchte.
Auch eine reine Embedded-Lösung könnte die bessere Wahl sein.
Wenn z.B. Echtzeit-Lösungen gefragt oder hohe Systemkritikalitäten zu Grunde liegen.
Ich würde so eine Lösung auch anstreben, wenn z.B. ein Atmega nicht mehr ausreichen würde.
(Ich weiß ja nicht was ihr vorhabt.)
Ich kann nur für meinen Roboter hier im Thread schreiben.
Brauche die Rechenleistung für die Bildauswertung und die Leistungsreserven für meine Softwareexperimente.
Zudem habe ich es bei der Softwareentwicklung für so einen Standard-PC deutlich einfacher als für ein Embedded.
Der Roboter ist eben auch ein Stück weit meine Experimentalplattform.
Ich habe auch eine Festplatte eingebaut, und fahre damit im Gelände.
Habe damit noch keine Probleme bekommen.
Nicht zuletzt weil der Roboboter ein gefedertes Fahrgestell hat und zur Festplatte hin verschiedene Dämpfungen, bis hin zur Vibrationsdämpfung eingebaut sind.
Zudem ist mittlerweile eine Laptop-Festplatte verbaut, die aufgrund der leichten Mechanik im Inneren nicht so superempfindlich ist.
Die Festplatte selbst ist ja eigentlich ein anderes Thema, dafür gibt auch mehrere Lösungen.
Für Geld bekommt man wahrlich alles... Immer wieder gern im Auto verbastelt werden so genannte SolidState-Festplatten.
Etwas günstiger (aber noch keine Erfahrungen damit gemacht) sind die IDE->SD Adapter mit denen man 4Gb SD-Karten als Festplatte nutzen kann.
USB-Sticks usw.
Ja nun Möglichkeiten gibt es sicher viele.. und noch mehr.
Die ITX-Lösung ist sicher nicht die beste für jeden. Wenn man die Wahl nach seinen Bedürfnissen fällt und sich auf das wesentliche beschränkt kann da eigentlich nur wenig schief gehen.
Viel Glück
Christian
mini ITX hab ich auch schon überlegt. Allerdings weis ich noch nicht welches Board ich nehmen will. Ein Kompettsystem ist mir fast ein wenig zu aufwendig. Da ich eigentlich nur die I2C anbindung brauche für meine Sensoren und Motoren. W-Lan ist im Moment auch nicht vorgesehen.
Hinzu kommt, das mein Roboter mit LiPos ausgerüstet werden soll, wegen dem Gewicht. Die sind zwar sehr viel teurer aber dafür auch viel effizienter.
das mit ide -> sd adapter wusst ich auch nicht,
ich wollte eigentlich mit den colibri modulen von toradex arbeiten, aber ein mini itx wäre auch was feines, weil das ein richtiger pc wäre mit mehr leistung als so ein modul, nur beißt sich das mit meiner bauweise , will ein kleinen ketten bot bauen, da ich für nen großen kein geld hab
Gruß
Der merkliche Vorteil beim ITX (wenn man die Echtzeit-features eines Embedded nicht braucht usw.) ist das einfache Debbuging beim schreiben der Software.
Mit LiPos brauche ich gar nicht anzufangen. Die wären in der benötigten Masse zu empfindlich/explosiv aber auf jeden Fall auch zu teuer für meinen Bot.
Aber solange ich meinem Roboter nicht das Fliegen beibringen möchte ist das auch kein Thema.
Die implizite Geschichte mit dem (energie)effizienten Kettenbot habe ich überlesen ^^
Die IDE->SD Adapter habe ich mal bei Ebay entdeckt.
Es gibt auch noch IDE Flashmodule DOM (Disc On Memory)
Will dazu aber auch schreiben dass die Flash und SD-Lösungen bisher noch nicht sonderlich zuverlässig arbeiten und zudem auch nicht schneller sind als Festplatten.
Da fällt mir ein... habe hier noch eine micro-Festplatte 15 Gb von meinem Ex-MP3-Player rumliegen. Diese Hitachi-Platte könnte man auch bei kleinen Bots prima in Watte einpacken.
Gibts ähnlich auch bei Conrad.
http://www.conrad.de/minifestplatten
Warum baut ihr keine ATMegas mit I2C Erweiterung ein?
Also wenn der ganze Schnickschnack wie W-Lan, USB etc. nicht benötigt wird ... und die Bots mit mittlerer Sensorenausstattung IR, US, Licht, Compass autonom arbeiten sollen.
liegt das doch sehr nahe.
Denn genau genommen sind das auch Embedded-Systeme.
Und für eine Ansteuerung im Low-Level-Bereich kommt man auch mit einem ITX nicht um einen MC herum.
Die Sensoren können mit so einem Embedded-Modul oder ITX sowie so nicht direkt augelesen werden.
(Nur so ein Gedanke)
Gruß zusammen,
Christian
Hallo zusammen,
hier ein kleines Update.
Die Kiste ist seit ca. Mitte 2008 fertig.
Nach vielen Tests und Events wurde das Gerät bei mir zu Hause (sozusagen als Wachhund) in Dienst gestellt.
Externes Bild anzeigen
Abb. Da war er sozusagen noch neu.. mittlerweite ist er ein paar Schrammen und Modifikationen älter.
Seitdem wird auch an einem neuen gearbeitet. Diesmal, ein paar Erfahrungen, Ideen und Maschinen reicher, wurde wieder vom Scratch neu entwickelt.
Die Planung und Materialforschung, verbunden mit der Herstellung benötigter Vorrichtungen, ist seit kurzem Abgeschlossen. Ich hoffe das alles funst.. sodass ich bald guten Gewissens die ersten Bilder veröffentlichen kann. (Drückt mir die Zehen)
Viele Grüße aus Karlsruhe
Christian
ENDE
Hallo Christian,
gratuliere, das ist ein beeindruckendes Projekt und dank deiner schönen Präsentation kann man stundenlang in den Details schmökern. Viel Spass und weiterhin so viel Erfolg.
grüsse,
Hannes
Danke Hannes,
ich habe auf deiner Seite auch gerade geschmökert. Ganz schön vielseitig, alle Achtung.
Die 'Weiter' Buttons gefallen mir! Mal überlegen, vielleicht kann ich so den Unterhaltungswert meiner Seite steigern.
Wünsche dir weiterhin viel Spaß beim schmökern.
Viele Grüße
Christian
Hi UlrichC,
sehr beeindruckendes Projekt. Bin mal gespannt was noch an Ausbausufen kommt.
Gruß,
Sven