#-o Hab ich doch oben geschrieben: Der Schaltplan ist zu groß. Den kriege ich hier nicht rein.Zitat:
Zitat von Lunarman
Ich ätze das selbst. Geht schnell und ohne Probleme.Zitat:
Zitat von Lunarman
jon

Druckbare Version
#-o Hab ich doch oben geschrieben: Der Schaltplan ist zu groß. Den kriege ich hier nicht rein.Zitat:
Zitat von Lunarman
Ich ätze das selbst. Geht schnell und ohne Probleme.Zitat:
Zitat von Lunarman
jon
Hallo,
ich habe endlich alle Motoren und Reifen beisammen. Da werde ich gleich weiterbauen. *freu*
Mit dem Layout bin ich noch nicht wirklich weitergekommen, da ich mittlerweile selbst nicht mehr ganz durchblicke *schäm*
jon
:-b aso, hab ich überlesen :-b
Sieht ganz gut aus, aber kannst du ernsthaft so kleines SMD löten? Wär natürlich gut wenn du es schaffst. Also viel Glück ^^
Ich werde mein Bestes geben. Ich habe schön öfters mit SMD Teilen gearbeitet. Sollte also eigentlich kein Problem sein.
Ich habe jetzt alle Räder mit den Motoren verbunden und muss die Räder nur noch am Chassis befestigen. Das Chassis wird dann mit Motoren und rädern ganze 3166Gramm wiegen. Also 834Gramm weniger, als ich geplant habe. Bilder kommen, wenn die Motoren befestigt sind, wenn ich heute noch soweit komme auch ein Video von der ersten Testfahrt.
jon
Die Räder sind jetzt am Chassis montiert, das Teil hat jetzt aber einen recht starken Rechtsdrall.
Hat jemand eine Idee, woran das liegen könnte, oder brauchst ihr noch ein paar mehr Infos? Ein Video wird noch nachkommen.
Kann ich den Drall eventuell über den Motortreiber ausgleichen? Mein ihr, dass das klappen wird?
Ich werde die Motoren doch nur über einen 7,2Volt Akku-Pack betreiben, da ich so schon Probleme habe dem Bot aus der Hocke hinaus hinterher zu rennen.
Dann kann ich auch die billigeren Modellbau-Motortreiber verwenden :)
jon
Hoffe dass das Video bald kommt :-)
Der Bot wird mit Sicherheit noch besser als Imadeit,
bist wirlich ein riesen Vorbild für mich, ich bin leider noch nicht ganz so weit,
besser gesagt fang ich erst an ;-)
Sorry fürs OT
Das Video gibt es hier:
http://www.youtube.com/watch?v=mPWFbTVJebM
(Video.google.de ist am Ar***, Youtube.com braucht etwas länger. Der Link kommt nach, wenn Youtube.com fertig ist.)
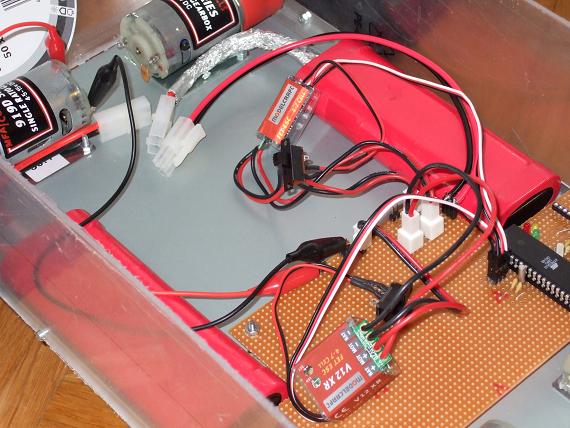
Und noch zwei Bilder vom Versuchsaufbau:


Ich bin im Moment vor allem froh, dass der Bot nicht so laut wie IMADEIT-V1 ist.
jon
Das liegt an den Motoren. Die laufen nie gleichschnell. Das wirst du über Abtastung und Software in den Griff bekommen müssen.Zitat:
Zitat von Jon
Zumindest lasse die Motore unbelastet 1-2 Akkuladungen einlaufen. Das hilft etwas.
Gut, dass du das sagst!
Soll ich die Motoren mit Rädern einlaufen lassen, oder ohne?
jon
P.S.: Ich habe oben den Video-Link hinzu gefügt!
Hallo Jon,
es empfielt sich die Motoren ohne Last, also am besten auch ohne Räder bei mittler Drehzahl einlaufen zu lassen. Wenn Du willst, das der Bot gerade fährt, dann musst Du einen PID-Regler einbauen, der die Drehzahl der Motoren ständig misst und die Motoren dem entsprechend steuert. Nur so wirst Du den Drall dauerhaft wegbekommen.
MfG Mark
Wieviel Bodenfreiheit hast du jetzt?
Hallo,
ich habe die Motoren mal 1 1/2 Akkus ohne Räder einfahren lassen, jetzt habe ich nur keine Akkus mehr, um zu testen, ob der Bot jetzt geradeaus fährt. werde ich also morgen testen müssen.
die Bodenfreiheit beträgt ganze 49mm. Also recht viel.
@Mark,
hast du mal eine genauere Beschreibung eines PID-Reglers? Ich habe mir zwar das aus Wikipedia und der Wiki durchgelesen, habe auch google angestrengt, aber aus den Infos werde ich nicht schlau, wie ich das aufbauen muss. :-k
Vor allem verwirrt mich diese Bild etwas:

jon
Der PID wirde am Besten funktionieren, wenn du an jeden Motor direkt an die Welle kämst, um dort die Drehzahl ablesen zu können. PID-Regler lieben hohe Eingangswerte für eine schnelle Regelung. Einen Bascom-Schnipsel hätte ich für Dich. Aber unbedingt ein Studium der Reglergleichung machen ;-)
Wie soll ich das verstehen? Was ist kämen?Zitat:
Zitat von Opus
Auf jeden Fall mal her damit!Zitat:
Zitat von Opus
jon
kämst = kommen würdest...
Der Code ist angepasst an einen Modellbauregler. Ich habe nur wenige Eingangsimpulse (10 pro Radumdrehung) und nehme daher die Timerzeit zwischen den abfallenden Flanken bei Pulsein Pulse...Code:'DIMs for PID
Dim Cc As Integer
Dim C_old As Integer
Dim Drive As Bit ' Regulator on ?
Dim Manual_value As Single ' Output if not regulating
Dim Pulse As Word
Dim Pakt As Word
Dim Sp As Single ' Setpoint
Dim Pv As Single ' Process Value
Dim Cv As Single ' PID output
Dim First_execution As Byte ' First start recognition
Dim Initial_error As Single ' Startup difference
Dim Last_pv As Single ' Last PV
Dim Last_sp As Single ' Last SP
Dim Sum_error As Single ' Summed error value
Dim D_pv As Single ' Derrivated delta PV
Dim Error As Single ' Difference between SP and PV
Dim Pterm As Single ' Proportional calculated part
Dim Iterm As Single ' Integrated calculated part
Dim Dterm As Single
'-----------------------
do
alles mögliche und...
Drive = 1
Pulsein Pulse , Pind , 3 , 0 ' time slices
If Pulse = Pakt Then Goto Aa ' nur rechnen bei neuem Wert
Pakt = Pulse
Incr Etappe
If Pakt = 0 Then Pakt = 38000
Pv = Pakt / 111 'Fahrt start
Gosub Regulator
If C_old = Cc Then Goto Aa 'Servo nur bei neuem Wert stellen
Call Servo(4 , Cc)
C_old = Cc
while
'----------------------------------------------
Regulator:
' -----[ Start of PID Regulator]---------------------------------------------
Const Kp = 0.29 ' Proportional factor Eingang x P
Const Ki = .25 ' Integration factor diff + diff x zeit
Const Kd = .65 ' Derivation factor abweichung x zeit
Sp = Speed
' Derivated calculated part
' -----[ Code ]--------------------------------------------------------------
If Drive = 1 Then
' -------- Regulating modus
Error = Sp - Pv
Sum_error = Sum_error + Error
Iterm = Ki * Sum_error ' Integrated CV part
' -------- First time startup
If First_execution < 2 Then
If First_execution = 0 Then
Sum_error = Manual_value / Ki
First_execution = 1
Initial_error = Error
End If
Pterm = 0
Dterm = 0
If Initial_error > 0 And Error < 0 Then
First_execution = 2
Last_pv = Pv
End If
If Initial_error < 0 And Error > 0 Then
First_execution = 2
Last_pv = Pv
End If
Last_sp = Sp
' -------- Normal calculation loop
Else
D_pv = Last_pv - Pv
Last_pv = Pv
Dterm = Kd * D_pv ' Derivated CV part
If Sp = Last_sp Then
' -------- Normal loop when setpoint not changed
Pterm = Kp * Error ' Proportional CV part
' -------- Loop when setpoint changed
Else
Pterm = 0
Dterm = 0
If Sp > Last_sp And Pv > Sp Then
Last_sp = Sp
Last_pv = Pv
End If
If Sp < Last_sp And Pv < Sp Then
Last_sp = Sp
Last_pv = Pv
End If
End If ' Enf of SP change seperation '
End If ' Enf of first time running seperation '
Cv = Pterm + Iterm ' Summing of the tree
Cv = Cv + Dterm ' calculated terms
' -------- Forced modus
Else ' When running in non regulationg modus
Cv = Manual_value ' Set output to predefined value
First_execution = 0 ' restart bumpless
End If
If Cv < -5000 Then Cv = -5000
If 5000 < Cv Then Cv = 5000
Cc = Cv / 100
Cc = Cc * 2
If Backwards = 0 Then
Cc = 128 + Cc
If Cc < 80 Then Cc = 80
If 128 < Cc Then Cc = 128
Else
Cc = 120 - Cc 'bei Rückwärtsfahrt
If Cc < 128 Then Cc = 128
If 170 < Cc Then Cc = 170
End If
'Print "P_akt:" ; Pakt ; " Cv:" ; Cv ; " CC: " ; Cc ; "Car_bearing" ; Car_bearing
Return
Ich hoffe, alle DIMs mitgegeben zu haben. Übrigens stammt der Code auch aus diesem Forum. Ich finde nur die Stelle nicht mehr.
Warum muss das eigentlich so kompliziert sein?
Reicht es nicht, wenn ich auf beiden Seiten die Umdrehungen messe und dann die Seite langsamer stelle, die zu schnell dreht? (natürlich nur beim vor und rückwärts fahren)
jon
Kannst du nicht alle paar Sekunden den Bot nach dem Kompass ausrichten Also Wert speicher, fahren, vergleichen, ausrichten, fahren usw., kann ja alles während der Fahrt gemacht werden (Räder nicht gegensinnig drehen, halt nur die eine Seite verstärkt).
Theoretisch schon, bei IMADEIT-V1 hat es nur nie geklappt. War aber auch ein ganz anderer Roboter.
Ich denke, ich werde erstmal das Geradeausfahren so zustande bringen, dass ich mit dem PWM-Werten experimentiere, und wenn ich dann einen Kompass angeschlossen habe, erstmal über den. Eigentlich sollte es auf Strecken von bis zu 100m locker funktionieren, mehr als 1km sollte aber schwierig werden, da sich dann der Winkel zum Magnetfeld zu stark ändert, und damit die Ausrichtung nach Norden. Sollte das mit dem Kompass wider Erwarten nicht gehen, werde ich es mit dem Wegstreckensensor machen müssen.
Aber bis dahin wird viel Zeit vergehen.
Ich werde morgen mal versuchen das Layout fertig zu machen, dann weiß ich nämlich, was für Teile ich bei Reichelt bestellen muss, danach werde ich Motorregler kaufen, wenn der Bot dann erstmal durch den µC ohne Sensoren gesteuert wird (Blind fahrt), werde ich mich um die US und IR Sensoren kümmern. Den Kompass werde ich von IMADEIT-V2 nehmen.
Noch eine schöne Nacht und bis morgen!
jon
Hi Jon,
zum Test ob es nicht auch an deinem Fahrgestell liegt, kannst du die Motoren einmal komplett auf die andere Seite setzen. Wenn es an den Motoren liegt müsste er dann nach links drehen.
Und wenn es an den Motoren liegt, kannst du auch nur einen pro Seite tauschen. Dadurch hättest du auf jeder Seite einen langsamen und einen schnellen Motor.
Jörn
#-o Ich habe überlegt, wie ich die Motoren mal tauschen könnte, bin aber nicht auf die Idee gekommen, nur die Motoren mit den Rädern zu tauschen, und nicht die Motoren ohne dir Räder zu tauschen ](*,)
Deswegen; Danke für deinen Hinweis!
jon
Jon, meiner zieht auch nach rechts.
Kann man ja per Software bereinigen ;-)
Hallo,
ich war heute mit dem Bot draußen etwas unterwegs.
Ergebnis:
Kanten bis zu 10cm sind kein Problem, egal ob aufwärts oder abwärts.
Graß für zu fast keiner Geschwindigkeitsverminderung.
Egal, wie ich die Räder kombiniere, das Teil hat einen Rechtsdrall.
Ich hoffe, das kann ich mit der Software ausgleiche.
Desweiteren habe ich jetzt entschieden, dass ich die Platinen erstmal auf Lochraster mache, da ich dann Fehler in der schaltung besser beheben kann.
jon
Ich glaube nicht, dass ein brauchbarer Regelalgorythmus hierfür einfacher ist, als wenn man den Geradeauslauf über die Drehzahl der Motoren oder der Räder regelt.Zitat:
Kannst du nicht alle paar Sekunden den Bot nach dem Kompass ausrichten Also Wert speicher, fahren, vergleichen, ausrichten, fahren usw., kann ja alles während der Fahrt gemacht werden (Räder nicht gegensinnig drehen, halt nur die eine Seite verstärkt).
Ich würde eher tippen das funktioniert schlechter, weil ein Kompass störfälliger und ungenauer ist als Drehencoder.
Wenn das Fahrgestell einen Bogen fährt, muss das glaube ich nicht unbedingt an unterschiedlich schnell drehenden Motoren liegen.
Ein Fahrgestell mit vier Rädern fährt auch geradeaus, wenn nur ein Rad angetrieben wird, weil die Achsgeometrie das Fahrzeug in der Spur hält und die nicht angetriebenen Räder dadurch "mitgezogen" werden.
Kleinere Unterschiede zwischen den Motoren müssten sich dadurch eigentlich auch ausgleichen.
Ich würde mal kontrollieren, ob Achsgeometrie stimmt, oder eventuell ein oder mehrere Motoren etwas schräg sitzen.
Eventuell lässt sich der Geradeauslauf auch verbessern wenn man die Motoren absichtlich etwas schräg montiert, so dass die Räder etwas Vorspur haben.
Warum sollte das teil noch geradeaus fahren? Wenn ich nur einen Motor antreibe, dann gurkt das teil nur durch die Gegend.Zitat:
Zitat von recycle
Ich würde mal kontrollieren, ob Achsgeometrie stimmt, oder eventuell ein oder mehrere Motoren etwas schräg sitzen.[/quote]
Die sollte stimmen.
Wobei ich nicht garantieren kann, dass das um 0,3mm genau ist. Aber um 0,5mm auf jeden Fall.
Ich werde mir heute mal zwei Motorregler hohlen. Da ich nur mit 7,2volt arbeite kann ich diesen ohne Probleme nehmen.
jon
Ist doch egal!
Gibt es einen vernünftigen Grund unbedingt geradeaus fahren zu müssen? Das ist ein autonomer Bot und keine Eisenbahn. Alle Menschen und Tiere können es nicht und haben keine Probleme deswegen. Dafür haben wir einen Kopf und Augen und können unseren Weg ständig optimieren. das ist auch das mindeste was ich meinem Bot abverlangen möchte.
Stimmt zum teil. Wenn er wirklich direkt sichtbar nen Drall hat, würde es mich einfach stören, auch wenn er die Wand trotzdem erkennt. Wenn er auf 100 m einen meter daneben liegt, würd ich sagen, egal.
Die Motorregler habe ich jetzt da, das Layout für die Lochrasterplatine habe ich auch fertig.
Das heißt, dass ich mich jetzt ans Löten machen kann.
Für mich wäre wichtig, dass der Bot einigermaßen geradeaus fährt, da es dann leichter ist einen Weg zu fegen.
aber bis dahin ist noch viel Zeit...
Nur so: Ich habe bis jetzt für IMADEIT-V2 190 ausgegeben. Also verdammt viel. Das wird noch deutlich mehr werden, da acht IR-Sensoren und vier US-Sensoren auch einiges kosten.
Im Moment habe ich das Geld, mal schauen, wie es in Zukunft sein wird, da mein Hauptsponsor (meine Oma) wahrscheinlich demnächst ins Pflegeheim kommen wird. Da wird dann also einiges an Geld für mich wegfallen.
Nun mache ich mich erstmal an die Platine!
jon
Hallo,
die Platine ist schon seit ein paar stunden fertig, nur kriege ich die Motoren nicht zum Laufen.
Bevor ich den Fahrtregler ordentlich benutzen kann, muss ich den erst programmieren, und das gelingt mir im Moment nicht ganz. Da werde ich mich morgen nochmal dran setzen.
Könnte es sein, dass ich Fahrtregler und Brushless-Regler nicht wie einen Servo über BASCOM ansteuern kann, sondern mit PWM arbeiten muss?
jon
EDIT: Hab mal noch ein paar Bilder gemacht \:D/

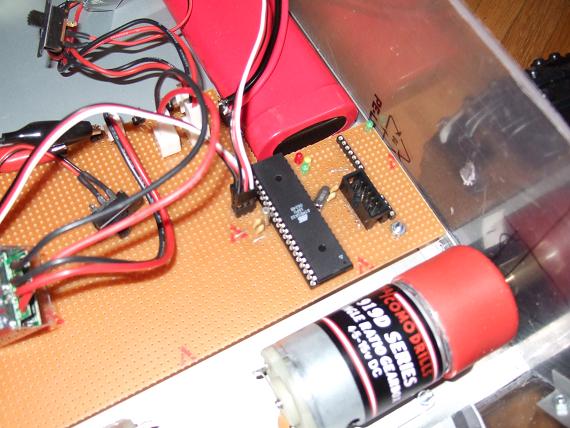
WOW sieht echt Ordentlich aus! Da wird man doch glatt neidisch!
Wie ist eigentlich der obere Teil geplant? Bzw wird es einen überhaupt geben?
Dass dein Fahrgestell nicht geradeaus fährt, wenn du nur einen Motor antreibst, liegt daran, dass die andeeren Räder nicht frei rollen können, sondern von den stehenden Getriebemotoren gebremst werden.Zitat:
Warum sollte das teil noch geradeaus fahren? Wenn ich nur einen Motor antreibe, dann gurkt das teil nur durch die GegendZitat:
recycle hat folgendes geschrieben::
Ein Fahrgestell mit vier Rädern fährt auch geradeaus, wenn nur ein Rad angetrieben wird, weil die Achsgeometrie das Fahrzeug in der Spur hält und die nicht angetriebenen Räder dadurch "mitgezogen" werden.
Kleinere Unterschiede zwischen den Motoren müssten sich dadurch eigentlich auch ausgleichen.
Ich wollte damit eigentlich auch nur verdeutlichen, dass die Achsgeometrie eine grosse Rolle spielt.
Dass dalle Räder genau geradeaus stehen vermeidet man normalerweise, weil der Geradeauslauf dann eben nicht besonders gut ist.Zitat:
Wobei ich nicht garantieren kann, dass das um 0,3mm genau ist. Aber um 0,5mm auf jeden Fall.
Der ist besser, wenn die Räder etwas Vorspur haben.
Ob das bei dir auch hilft, könntest du ja ausprobieren. Da du dafür die Löcher für die Motorbefestigung ändern, bzw. vergrössern musst, würde ich das allerdings lieber erst mal auf nem alten Brett oder was ähnlichem probieren.
Eigentlich nicht, weil man für Servos und Fahrtregler ja auch dieselben RC-Empfänger verwendet.Zitat:
Könnte es sein, dass ich Fahrtregler und Brushless-Regler nicht wie einen Servo über BASCOM ansteuern kann, sondern mit PWM arbeiten muss?
Ich hänge immer noch an dem Fahrtregler *gg*
Was für einen Reload-Wert soll ich verwenden?
Hat jemand mal ein fertiges Programm zum Ansteuern eines solchen Fahrtreglers?
jon
Mittlerweile habe ich Zweifel, ob der Servo Befehl der richtige ist.
Der Befehl hat nur eine begrenzte Gültigkeit (es wird gewartet, bis der Befehl abgearbeitet ist, danach wird im Programm fortgefahren, das Signal wird nicht mehr weitergesendet --> Motor hört auf zu drehen).
Stimmt da etwas bei mir nicht, oder muss ich den Fahrtregler doch anders ansteuern??
@oratus sum:
es wird hoffentlich noch ausätze geben. Erstmal muss ich aber das teil zum µC gesteuerten Fahren kriegen.
Ich hoffe auf eine möglichst schnelle Antwort, da ich mich langweile!
jon
Der Servo-Befehl in Bascom sollte eigentlich keine begrenzte Gültigkeit haben. Wenn du da mit Servo(x) = y eine Pulsweite für das Servosignal vorgibst, sollte diese regelmässig ausgegeben werden, bis du mit demselben Befehl eine neue vorgibst.Zitat:
Der Befehl hat nur eine begrenzte Gültigkeit (es wird gewartet, bis der Befehl abgearbeitet ist, danach wird im Programm fortgefahren, das Signal wird nicht mehr weitergesendet --> Motor hört auf zu drehen).
Stimmt da etwas bei mir nicht, oder muss ich den Fahrtregler doch anders ansteuern??
Die Frequenz kannst du mit dem Reload-Befehl vorgeben.
Ich habe vor langer Zeit in einer entsprechend älteren Bascom Version mal mit dem Befehl herumexperimentiert und da funktionierte es auch halbwegs.
Ich hatte etwas Probleme mit der Genauigkeit des Servosignals, aber das lag vermutlich an meiner Schaltung.
Könnte es sein, dass du in deinem Programm irgendwo denselben Timer verwendest, den auch der Servo-Befehl intern nutzt?
Ein Oszi wäre hilfreich, aber das hast du ja wahrscheinlich nicht.
Ich habe nur die Motoren angeschlossen. Sonst nichts. also verwende ich den Timer nicht noch irgendwo anders.
Ein Oszi habe ich leider nicht, aber ich werde es mal mit einem Soundkarten Oszi versuchen.
Außerdem werde ich mal ein Video machen, das zeigt, wie sich die Motoren verhalten, und das zugehörige Programm werde ich auch posten.
jon
Mittlerweile kann ich die Fahrtregler einigermaßen ordentlich ansteuern.
Ich verwende im Moment dieses Programm:
192 ist Stopp, 128 volle Fahrt vorwärts, 255 volle Fahrt rückwärts.Code:$regfile = "m32def.dat"
$crystal = 16000000
$baud = 9600
Config Servos = 2 , Servo1 = Portc.2 , Servo2 = Portc.3 , Reload = 5
Config Portc.2 = Output
Config Portc.3 = Output
Enable Interrupts
Servo(1) = 192
Servo(2) = 192
Wait 2
Servo(1) = 128
Servo(2) = 128
Wait 2
Servo(1) = 255
Servo(2) = 255
Wait 2
Servo(1) = 192
Servo(2) = 192
End
Das sieht in der Luft so aus:
http://video.google.com/videoplay?do...62746344&hl=en
Auf Graß so:
http://video.google.com/videoplay?do...14239501&hl=en
Was ist da los???
Warum fangen die Motoren nicht gleichzeitig an zu drehen?
Kann ich dagegen irgendetwas machen?
Klar ist, dass das so nicht geht.
jon
Ich glaube da würde eine Beschreibung deines Regler helfen.Zitat:
Was ist da los???
Warum fangen die Motoren nicht gleichzeitig an zu drehen?
Kann ich dagegen irgendetwas machen?
Bei Modellbaureglern gibt es grosse Unterschiede, wie man Nullstellung und Maximalstellungen programmiert usw.
Es gibt z.B. Regler die sich beim Einschalten automatisch programmieren.
Wenn du bei so einem Regler den Strom für deine Schaltung und den Regler gleichzeitig einschaltest, könnte es sein, dass der Regler schon die Nullstellung misst, bevor dein Controller richtig da ist.
Soetwas könnte z.B. erklären, bei dir die Nullstellung bei 0,96ms liegt und nicht bei 1,5 ms wie es normalerweise der Fall ist.
Wenndie Nullstellung bei der Programmierung verschoben wird, verschieben sich auch die Maximal- und die Minimalstellung (also vorwärts und rückwärts).
Einige Regler nehmen es auch mit der Rückwärtsstellung nicht so genau, weil man bei RC-Auto die Geschwindigkeit beim rückwärts fahren nicht unbedingt feinfühlig steuern muss, sonders es reicht, wenn man überhaupt zurücksetzen kann.
Tendentiell stimmen deine Werte ja. Bei dir ist hauptsächlich der Nullpunkt verschoben und das könnte an der programmierung liegen.
Ich habe diesen Fahrtregler: http://www.conrad.de/goto.php?artikel=231638
Den muss man am Anfang programmieren, und ich habe die Werte verwendet, die ich oben im Programm auch verwende. Also sollten die Fahrtregler als Stopp, Vorwärts und Rückwärts auch das Selbe gespeichert haben.
jon
Hallo,
ich habe beide Fahrtregler neu programmiert und es geht jetzt ohne Probleme! *freu*
der Rechtsdrall ist wie zu erwarten immer noch da, aber ich werde jetzt die Verkabelung neu machen, und dann die Sensoren einbauen. Danach werde ich versuchen den Bot dazu zu kriegen geradeaus zu fahren.
Videos werden nachkommen, wenn die Verkabelung neu gemacht ist.
jon
Glückwunsch :)
Wie schwer ist der Bot mittlerweile denn?
Was sind das für Akku's und Motoren denn genau?
Gruß
Stefan
Vielen Dank!
Das sind diese Motoren: http://www.conrad.de/goto.php?artikel=222365
Und diese Akkus: klick mich :-)
Ich würde gerne jetzt ein Video machen, aber draußen pisst es wie doof. Muss ich also noch etwas warten.
jon
EDIT: Wie schwer der Bot im Moment ist weiß ich gar nicht. Und meine Waage verträgt maximal 2000g. Dann hätte ich noch eine Personen waage hier, aber die taugt für 2-3kg nicht. :-k Ich glaube, ich muss irgendwo noch eine andere Waage auftreiben.