-
 Werbung
Werbung
-
Jep, das werd ich leider erst in 3 Wochen angehen können, sobald ich ausm Urlaub zurück bin...
Teile liegen alle bereit - und ich hab mich nochmal ans CAD-Programm geklemmt mit einigen Ideen im Kopf:
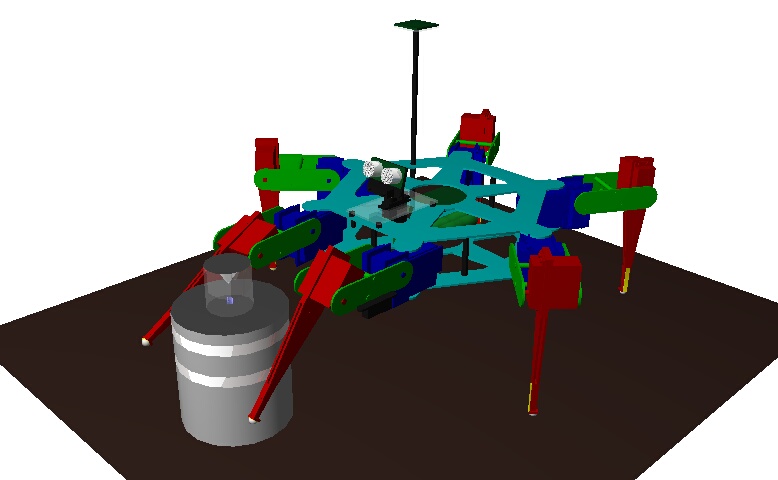
Ber der Platine an der langen Stange handelt es sich um den elektronischen Kompass - ich hoffe so einige Störungen der Servomotoren vom Kompassmodul fernhalten zu können.

Unter dem per Servo drehbaren US Sensor und an den Schenkeln beider "Vorderbeine" werden die IR Sensoren (schwer zu erkennen, da schwarz) angebracht werden, die Auswertung übernimmt der PICAXE auf der SD21-Platine - 3 DAC stehen da ja zur Verfügung.
An jedem Fuß sitzt ein mit Silikon vergossener Drucksensor - verbunden werden diese mit zwei 4 Fach 8Bit-ADC (PCF8591) der die Daten dann per I2C zur Verfügung stellt - die Platine dafür ist noch in Planung...
Ausserdem habe ich mir schonmal ein Konzept für eine Basisstation ausgedacht.
Es handelt sich um eine runde Säule, auf der zwei leitende Streifen angebracht sind - der Roboter hat je einen Federkontakt an der Innenseite der beiden vorderen Beine, welche direkt mit dem Akku verbunden sind.
In der Basisstation sitzt das Ladegerät sowie eine Art "Leuchtturm" - eine Infrarot-LED (eventuell werde ich mehrere LEDs verwenden müssen), die durch den oben angebrachten reflektierenden Kegel in alle Richtungen abstrahlt. Auf diese Weise soll der Roboter auch nach dem Anhäufen von Odometriefehlern seine Basis wiederfinden. Sie wird zugleich der Nullpunkt der selbstangefertigten Karte des Roboters sein und zum Abgleich verwendet werden.
 Berechtigungen
Berechtigungen
- Neue Themen erstellen: Nein
- Themen beantworten: Nein
- Anhänge hochladen: Nein
- Beiträge bearbeiten: Nein
-
Foren-Regeln
Werbung 







 Zitieren
Zitieren
Lesezeichen