




 Zitieren
ZitierenIs echt geil dein hexabot!!!!
Hoffe das ich meinen auch so toll hinkrieg^^
Mfg.Attila földes

 Werbung
Werbung

Hi!
Ja, also ich kann nur in die allgemeinen Jubelschreie einstimmen!
A B S O L U T C - O - O - L
Wird der über einen On Board controller oder über nen PC gesteuert?
VLg Tobi
VLG Tobi
http://www.tobias-schlegel.de
"An AVR can solve (almost) every problem" - ts
Is echt geil dein hexabot!!!!
Hoffe das ich meinen auch so toll hinkrieg^^
Mfg.Attila földes
Error is your friend!
Hat dir eigentlich schonmal jemand gesagt, dass der Bot saustark ist? Nein? Eh, der is geil!!!
Könntest du für die schnelleren bzw geduldigeren Fans noch ein höher-qualitäres Video reinstellen? Mir persönlich würden auch 100MB nix ausmachen...
Ich hab schon mal ne Dissertation eines Hexabots reingezogen, der auch (bei Kraft von außen) nachgeben konnte (siehe Bild unten). Aber der sieht irgendwie nicht so geil aus wie deiner und wird ein ordentliches Sümmchen mehr gekostet haben! - Transparenz macht viel her!
Grüß
NRicola
Gurken schmecken mir nicht, wenn sie Pelz haben!
Hi
Ja, es müssen auf jeden fall mehr Bilder her!!
(Ob 100MB oder nicht... EGAL.)
naja, ich finde den abgebildeten Bot nicht so toll, ist eher etwas.... hm. vorsichtig und langsam aus...
Naja, auf jeden Fall scheint er ein halbes Rechenzentrum an Bord zu haben.
Frage: Dein Bot ist ja eigentlcih recht schnuckelig (Grßenfergleich mit Feuerzeug) Was soll denn da alles drauf, oder sit das """nur""" ein Test?
Macht weiter so!
VLG Tobi
http://www.tobias-schlegel.de
"An AVR can solve (almost) every problem" - ts
Hallo Leute
Toller Roboter. Gratuliere !!
Wenn ihr das ganze mal CNC-Fräsen wollt, schaut mal auf:
https://www.roboternetz.de/phpBB2/ze...823&highlight=
l.G. Roberto
Vielen Dank erstmal für all das Lob - aber verausgabt euch nich so...er ist doch noch lang nich fertig
Hab heute den SD21-Servo Controller ins Innere des Bots verlegt
(oben drüber soll die Platte mit dem US und IR Sensor, so wären die genau mittig auf dem Roboter)
und das Funkmodul angebaut:
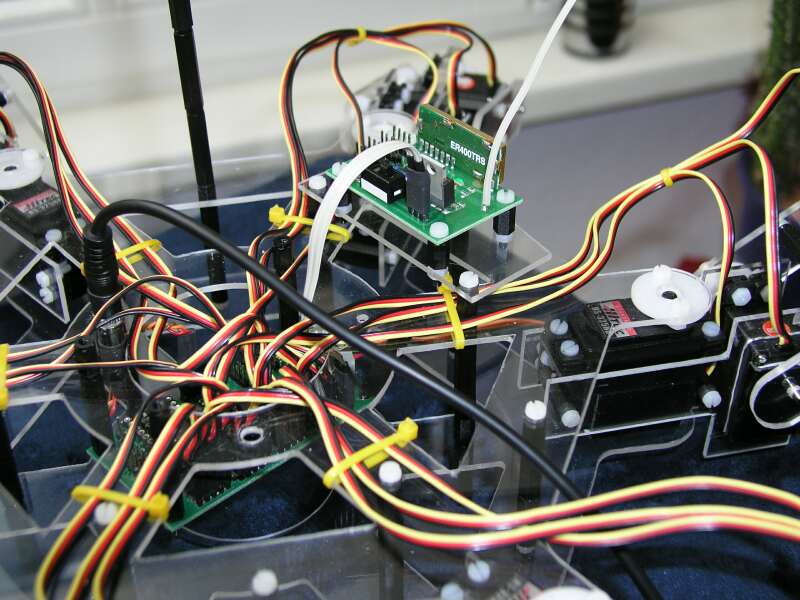
Und nun hab ich massive Störungen die offensichtlich von den Servos kommen.
Wenn die in Betrieb sind bekomme ich kaum Funkkontakt und er bricht dann ständig zusammen.
Ich muss nun erstmal die I²C Verbindungen durch abgeschirmtes Kabel ersetzen (hätte ich auch gleich dran denken können) und
die Spannunsgversorgung entstören.
Das ganze Teil frißt zur Zeit 600mA im Leerlauf (Beine werden in der Luft gehalten) und ca. 1A wenn er auf dem Boden steht
(1.5A wenn auf 3 Beinen stehend und 3 in der Luft, beim Aufstehen bis über 2A) !
Kann mir jemand von Euch sagen wie ich das am besten anstelle ?
Reichen da ein paar Kondensatoren parralel zur Batterie ?
Sind Ferritkerne notwendig ?
(Mit ratlosem) Gruß, da Fox
EDIT: hab noch ein zweites Problem!
Sobald ich das Funkmodul (CM02) und den SD21 per I2C verbinde, leuchtet die Sende-LED am Funkmodul dauerhaft und die Verbindung bricht zusammen.
Das auch, wenn die Servos nicht in Betrieb sind - Störungen in der Betriebsspannung oder des I2C Bus sind also ausgeschlossen.
Woran kann das liegen ?
Hallo ezfox,
zuerstmal, toller Roboter!!!
Zu den Problemen, Hier arbeitet einiges gegeneinander (deshalb unbedingte Vorsicht das da nichts abnippelt!).
Wenn ich mir das Bild ansehe, ist der PICAXE auf dem SD21 noch drauf. Gleichzeitig ist das CM02 angeschlossen. Das geht aber so nicht.
Der PICAXE kann nur als I2C-Master arbeiten, der CM02 auch. Das beißt sich.
Ein weiterer (wesentlicher) Grund aber für die Ekel-Effekte scheint zu sein, dass du den CM02 rückwärts über I2C mit Strom versorgst. Das ist auch so nicht gedacht. Hier also vom CM02 und SD21 nur die Masse verbinden, sofern die nicht durch den Akku ohnehin schon verbunden ist.
Dann sollte sich eigentlich erstmal einiges verbessern.
Viele Grüße
Jörg
Vielen Dank ! Das war das Problem mit der dauerhaft leuchtenden Sende-LED. Funktioniert jetzt einwandfrei.
Auf den PICAXE kann ich durchaus verzichten - der hätte ohnehin nur als Treiber für einfache Schrittfolgen bzw. als Notsystem bei Funkausfall gedient. Ich will den Roboter ja vom PC steuern lassen.
Nur die Störungen des I²C Busses bei laufenden Servos sind noch da - gehen aber auch weg, wenn ich getrennte Akkupacks für Servos und Logik benutze. Also brauch ich wohl weniger abgeschirmte I²C Verbindungen als vielmehr eine Glättung+Entstörung der Versorgungsspannung (wollte eigentlich nur mit einem Akkupack arbeiten!). Kannst Du mir noch einen Tip geben, was sich da anbietet ?
Gruß, da Fox
PS: hab grad bemerkt, das ich nicht ganz verstehe was Du mit folgendem Satz genau gemeint hast:
Wie sollte ich die Versorgungsspannung denn am besten verteilen ?"Ein weiterer (wesentlicher) Grund aber für die Ekel-Effekte scheint zu sein, dass du den CM02 rückwärts über I2C mit Strom versorgst. Das ist auch so nicht gedacht. Hier also vom CM02 und SD21 nur die Masse verbinden, sofern die nicht durch den Akku ohnehin schon verbunden ist."
Ich arbeite sowohl auf dem SD21 als auch auf dem CM02 mit den Festspannungsreglern.
Also am SD21 ist ein 6V-Akku für die Servos angeschlossen, über den Spannungsregler gehts runter auf 5V für die Logik.
Aber dann !?
Ich hab nur 3 Möglichkeiten:
a) CM02 über den I²C Bus mit Spannung versorgen (Deiner Aussage nach schlechte Lösung)
b) 6V-Akku parallel auch an den CM02 anschliessen
c) Jumper auf SD21 ziehen und 6V-Akku parallel an den CM02 anschliessen - SD21 Logik würde dann ebenfalls per I²C mit Spannung versorgt.
Bei b) mach ich mir aber Sorgen, da dann 2 Festspannungsregler parallel arbeiten würden
und deren Ausgänge und Masse über den I²C Bus miteinander verbunden wären.
Hallo da Fox,
schön das es jetzt besser geht.
Ich nahm an, du hättest die 6V-Leitungen (gleicher Akku) und die 5V Leitungen (hinter den Reglern) über den 4poligen I2C verbunden.PS: hab grad bemerkt, das ich nicht ganz verstehe was Du mit folgendem Satz genau gemeint hast:
Ein weiterer (wesentlicher) Grund aber für die Ekel-Effekte scheint zu sein, dass du den CM02 rückwärts über I2C mit Strom versorgst. Das ist auch so nicht gedacht. Hier also vom CM02 und SD21 nur die Masse verbinden, sofern die nicht durch den Akku ohnehin schon verbunden ist.
bei den genannten Strömen, wenn die Servos gleichzeitig losmachen da tut sich schon was auf der Leitung. Kurze dicke Kabel zum Servotreiber sind wichtig. Am Funkmodul würde ich noch einen zusätzlichen Stützelko von mindestens 500uF vorsehen. Hängt aber von der gewählten Versorgung (siehe unten) ab.Nur die Störungen des I²C Busses bei laufenden Servos sind noch da - gehen aber auch weg, wenn ich getrennte Akkupacks für Servos und Logik benutze. Also brauch ich wohl weniger abgeschirmte I²C Verbindungen als vielmehr eine Glättung+Entstörung der Versorgungsspannung (wollte eigentlich nur mit einem Akkupack arbeiten!). Kannst Du mir noch einen Tip geben, was sich da anbietet ?
so würde ichs erstmal probieren (bessere Entkopplung).b) 6V-Akku parallel auch an den CM02 anschliessen
sofern du die 5V Leitungen nicht verbindest ist das kein Problem. I2C kommt problemlos mit verschiedenen Potenzialen zurecht, nur GND muss verbunden sein.Bei b) mach ich mir aber Sorgen, da dann 2 Festspannungsregler parallel arbeiten würden
und deren Ausgänge und Masse über den I²C Bus miteinander verbunden wären.
Viele Grüße
Jörg
Ich tat wie Du mir geraten und nun funktioniert alles - die Störungen sind weg !!!
Vielen vielen Dank ! - You made my day
 Berechtigungen
Berechtigungen

Lesezeichen