




Kann mir da wirklich niemand von euch helfen ?Zitat von ezfox
Ich kann echt nix dazu finden und brauche die Info doch aber für die Odometrie !

 Werbung
Werbung
Kann mir da wirklich niemand von euch helfen ?
Ich kann echt nix dazu finden und brauche die Info doch aber für die Odometrie !

Naja ansonsten würden die Servos ja nicht immer das machen was sie sollen, oder ?? Wäre komisch wenn es anders wäre ...
Das Ganze gilt natürlich nur in bestimmten Toleranzgrenzen, die Servos werden natürlich nicht auf das hunderstel Grad wieder die Position einnehmen, aber in guter Näherung kannst du das erstmal annehmen
MfG Kjion
Danke Kjion !
Hatte meine Frage wohl etwas unvollständig formuliert:
Gibt es irgendwo eine Info, um wieviel Grad der Servo XY bei Änderung der Pulsweite um Z Millisekunden dreht ?
Ansonsten müsste ich das halt ausmessen...
Gruß, da Fox
Ich glaube ausmessen wird da das beste sein.
Für den normalen Modellbau ist es ja auch eigentlich egal ob das Servo sich bei gleichem Ausschlag am Sender gleich weit dreht, da man ja sowieso immer am nachsteuern ist ...
MfG Kjion
Jep, das werd ich leider erst in 3 Wochen angehen können, sobald ich ausm Urlaub zurück bin...
Teile liegen alle bereit - und ich hab mich nochmal ans CAD-Programm geklemmt mit einigen Ideen im Kopf:
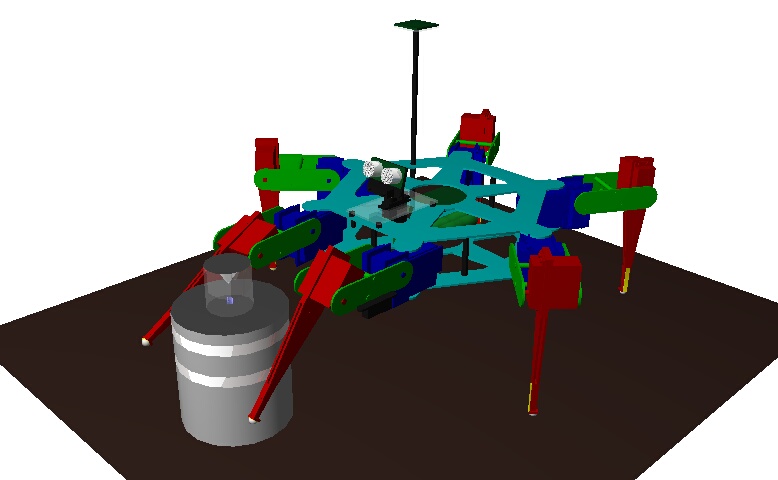
Ber der Platine an der langen Stange handelt es sich um den elektronischen Kompass - ich hoffe so einige Störungen der Servomotoren vom Kompassmodul fernhalten zu können.
Unter dem per Servo drehbaren US Sensor und an den Schenkeln beider "Vorderbeine" werden die IR Sensoren (schwer zu erkennen, da schwarz) angebracht werden, die Auswertung übernimmt der PICAXE auf der SD21-Platine - 3 DAC stehen da ja zur Verfügung.
An jedem Fuß sitzt ein mit Silikon vergossener Drucksensor - verbunden werden diese mit zwei 4 Fach 8Bit-ADC (PCF8591) der die Daten dann per I2C zur Verfügung stellt - die Platine dafür ist noch in Planung...
Ausserdem habe ich mir schonmal ein Konzept für eine Basisstation ausgedacht.
Es handelt sich um eine runde Säule, auf der zwei leitende Streifen angebracht sind - der Roboter hat je einen Federkontakt an der Innenseite der beiden vorderen Beine, welche direkt mit dem Akku verbunden sind.
In der Basisstation sitzt das Ladegerät sowie eine Art "Leuchtturm" - eine Infrarot-LED (eventuell werde ich mehrere LEDs verwenden müssen), die durch den oben angebrachten reflektierenden Kegel in alle Richtungen abstrahlt. Auf diese Weise soll der Roboter auch nach dem Anhäufen von Odometriefehlern seine Basis wiederfinden. Sie wird zugleich der Nullpunkt der selbstangefertigten Karte des Roboters sein und zum Abgleich verwendet werden.
du bist völlig wahnsinnig! geile sache das alles. auch die stylischte ladeposition in die sich ein bot bewegen könnte. ich will zwar nicht wissen, was das alles kostet. aber hört sich alles recht schlüssig an. aber meinst du wirklich es ist sinnvoll den bot stehen zu lassen (also die Servos aktiv) wenn er läd? einerseits nervt das, wenn er das nachts macht und andererseits dauerts dann afaik länger. mach doch einfach nen kleinen sockel, auf den sich der "rumpf" der "spinne" niederlässt und 2 stützen für die vorderen beine, auf denen sie aufliegen können. die stellung wäre dann die gleiche, jedoch "stromsparender".
alles in allem: super idee
-> MEIN PROJEKTBLOG <-
Sag mal welches CAD Proggi isn das eigentlich?
Und ausserdem find ich deine Idee auch ganz nett, ich glaub dein grösstes Problem wird sein dass du mal den Überblick verlierst.

Oder das ganze zu teuer wird.
Ich würde als Material Glasfaser oder ähnliche Matarialien verwenden, nur so ein Tipp! Is leichter und hält bei richtiger planung verdammt viel aus.
Ok cu!
Ja welche CAD proggi das is interessiert mich auch!
Der Bot sieht ziemlich geil aus. Drück dir die Daumen das alles so klappt wie du es dir vorstellst!
Mfg Timo
Hi ich find das ding auch geil viel glück noch. Und natürlich noch sehrviel Spaß bei der Sache.
MfG
der aller dümmste Anfänger
bitte bei schwerwiegenden Rechtschreibfehlern oder Unleserlichkeiten eine PN schreiben
Danke
http://www.openmoko.org/
Sieht super genial aus, der Bot. Auch die Idee mit einem Nullpunkt für deine Karte muss ich mir merken. (irgendwann bau ich auch einen Bot). Aber bei den beiden Streifen musst du aufpassen, das du nicht irgendwie verkantest mit den Beinen und die zufalligerweise dann jeweils falschen Pol ansteuern. Dann hast du ein Verpolung für die Akkus oder wie willst du das lösen?
 Berechtigungen
Berechtigungen


 Zitieren
Zitieren
Lesezeichen