-
 Werbung
Werbung
-
FoxBot (hexabot)
Ich möchte einen Hexabot mit 3 DOF/Bein bauen.
Es geht mir weniger darum, ein neuartiges Design zu erstellen - ich interessiere mich mehr für die Programmierung.
Daher benötige ich eine funktionale Basis und habe mich dafür entschieden,
das Design von Lynxmotions Extreme Hex 3-R zu übernehmen, da ich von diesem begeistert bin.
Als Material wird klares Acryglas mit 2mm Dicke verwendet werden, für die Schenkel 3mm. Der Durchmesser des "Körpers" wird 23cm betragen.
Der Antrieb wird aus 18 Hitec HS-325 HB Servos bestehen, welche von einem SD21 Controller mit PICAXE-18X als µC gesteuert werden.
Als Sensoren kommt ein SRF-08 und ein CMPS-03 zum Einsatz - ersterer soll auf einem Miniservo drehbar gelagert werden.
Mein Interesse besteht vor allem in der Kopplung an den PC, der die gesamte Auswertung der Sensoren, die Odometrie und Steuerung übernehmen soll.
Der Roboter soll sich eine Karte seiner Umgebung generieren und mit Hilfe dieser navigieren.
Durch Auslagerung der Logik auf den PC wird sich auch das Gewicht des Roboters (hoffentlich) in Grenzen halten...hab ausgerechnet,
das 1.5kg das Maximum für die Servos sein wird, um noch einigermassen agil zu sein.
Derzeit rechne ich mit einem Gewicht von 1.2kg.
Die Verbindung zum PC soll später per Funk erfolgen.
Aber bis dahin ist´s noch ein langer Weg...

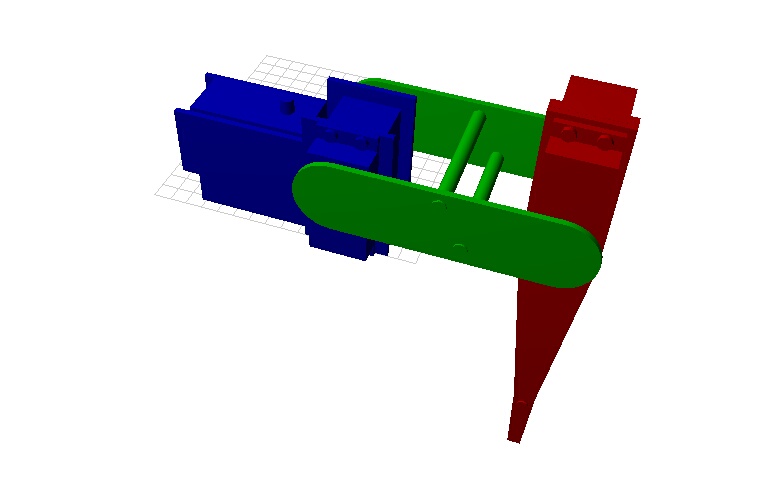
Hier schonmal zwei Bilder vom Entwurf:
Ein Bein:
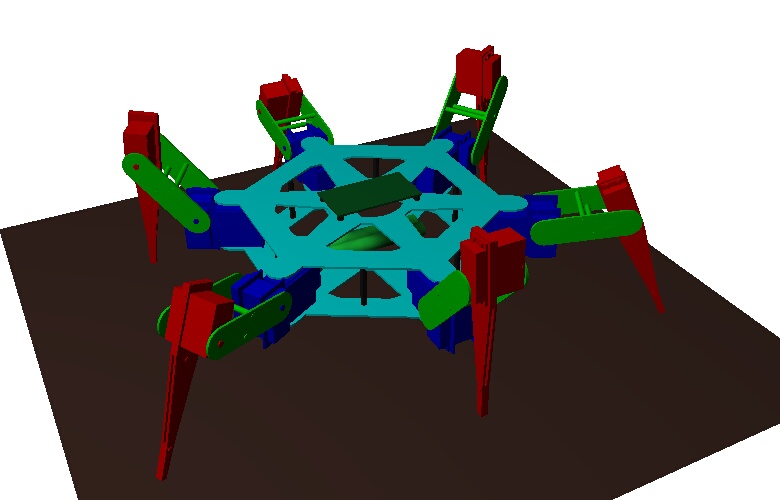
Der gesamte Roboter incl. Steuerplatine und Akku:
Was meint ihr - ist dieses Hirngespinst so umsetzbar oder habe ich da schwere Denkfehler drin ?

Gruß, da Fox
 Berechtigungen
Berechtigungen
- Neue Themen erstellen: Nein
- Themen beantworten: Nein
- Anhänge hochladen: Nein
- Beiträge bearbeiten: Nein
-
Foren-Regeln
Werbung 







 Zitieren
Zitieren
Lesezeichen