-
 Werbung
Werbung
-
Neuer Benutzer
Öfters hier
Wie viele IR-Sensoren?
Im Rahmen einer Maturaarbeit über Mikroprozessoren baue ich einen kleinen Roboter. Wie viele IR-Sensoren sind sinnvoll? Ich werde die Bausteine von Sharp verwenden.
Und in welchen Winkel zueinander sollten diese angebracht werden?
Kann ich verhindern, dass der Roboter über einen Abgrund hinaus fährt, indem ich einen Sensor verwende, der umgekehrt wie die Hindernisserkennung funktioniert? Also, dass die Motoren gestoppt werden sobald ein Grenzwert der Distanz überschritten wird?
Der Roboter wird gute 10cm breit werden. Der Roboter muss nicht komplett alle Kollisionen vermeiden, da es mir in erster Linie um die Funktion und den Einsatz des Prozessors geht.
Eignen sich die Sensoren mit einer Reichweite von 3-30cm?
-
Super-Moderator
Lebende Robotik Legende

Mit 2 Sensoren kommt man schon recht gut weiter. Man kann dannn den Raum vor dem Fahrzeug einigermaßen ertasten.
Ein weiterer nach unten wäre dann erforderlich.
Ich nehme an es sind die triangulations Sensoren gemeint. Häufig wird die 80cm Version eingesetzt.
Manfred
-
Neuer Benutzer
Öfters hier
Danke, damite wäre eigentlich alles klar.
Wie gross ist der Winkel, den die Sensoren erfassen ungefähr? Dazu steht nichts im Datenblatt.
-
Super-Moderator
Lebende Robotik Legende
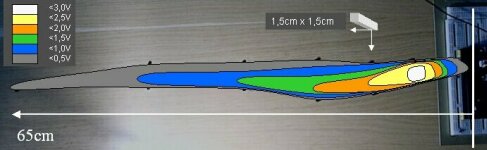
Das habe ich hier mal ausgemessen.
Die Richtcharakteristik ist recht schmal, aber sie können ja von beiden Seiten schräg über die Mitte ausgreichtet werden.
Manfred
https://www.roboternetz.de/phpBB2/vi...?p=15756#15756
-
wie reagieren die Dinger eingentlich wenn man sie auf einen Spiegel richtet?
-
Super-Moderator
Lebende Robotik Legende
Da es ein optischer Sensor ist zeigt er das an was im Spiegel zu sehen ist.
Wenn der Strahl dabei direkt in dem Empfänger gespiegelt wird, dann ist dabei jeder Wert des PSD über den Spiegelwinkel ansteuerbar.
(So wie man es erwarten würde).
Manfred
-
Erfahrener Benutzer
Robotik Einstein
wenn der sensor den abgrund ertastet hat, ist der arme robby auch verschwunden.
mfg pebisoft
-
Neuer Benutzer
Öfters hier
Ich habe bisher keine Erfahrungen im Roboterbau. Reicht es nicht den Sensor nach vorne unten zu richten? Ungefähr in 20cm Entfernung zum Sensor?
 Berechtigungen
Berechtigungen
- Neue Themen erstellen: Nein
- Themen beantworten: Nein
- Anhänge hochladen: Nein
- Beiträge bearbeiten: Nein
-
Foren-Regeln
Werbung 







 Zitieren
Zitieren
Lesezeichen