-
 Werbung
Werbung
-
Super-Moderator
Lebende Robotik Legende

Mechanische Konstruktion
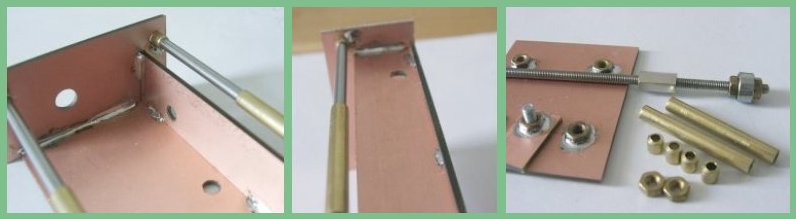
Das Linear-Servo ist aus doppelt kupferkaschierten Expoxydharzplatten aufgebaut. Zwei seitliche Endplatten tragen die 3mm Silberstahlführungsstäbe. Deren Parallelität ist das einzige kritische Maß im ganzen Aufbau. Zur besseren Vorjustierung können die Bohrungen für die Halterungen der Führungsstäbe gemeinsam in die zusammengespannten Endplatten eingebracht werden.
Die Platten lassen sich leicht rechtwinklig zusammenlöten wenn man sie dabei auf rechtwinklige Holzklötzchen legt und die Position nach dem Anbringen erster Lötpunkte überprüft. Das Verlöten der Grundplatte auf beiden Seiten der Rückwand ergibt eine gute Stabilität in der Länge und die rechte und linke Endplatte fixieren den Winkel.
Die Silberstahlstäbe lassen sich über kurze Messinghülsen mit den Endplatten verbinden. Dreht man die Hülsen mit einem Rohrabschneider von einem Messingrohr ab und lässt sie auf der Montageseite konisch dann lassen sie sich gut in den Endplatten zentrieren. Ich habe sie gleich zusammen mit den Stahlstäben eingesetzt und durch Löten vorfixiert. Durch ein Nachlöten am Ende der gesamten Montage könne die Führungen abschließend zusammen mit dem Schlitten nachjustiert werden.
Als Gehäuseteil bleibt noch der Schlitten der mit M3 Gewindebohrungen ausgestattet wird. Hierzu werden auf die 4mm Bohrungen Messingmuttern gelegt und zum Verlöten vorübergehend zentrisch (mit Senkkopfschrauben) fixiert.
Als weiteres Einzelteil ist im rechten Bild noch die 100mm lange M3 Gewindestande zu erkennen. Sie trägt den M3 Abstandsbolzen mit dem der Schlitten angetrieben wird. Rechts auf der Stange ist das Kugellager mit 2 Muttern fixiert.
Interessant an diesem Abschnitt war für mich, wie einfach sich die relativ solide Konstruktion zusammensetzen läßt. Am schwierigsten war es, die optimalen Abmessungen auch für unterschiedliche Motorgrößen zu finden. Für die Motorisierung und die Montage des Motors gibt es dann eine recht günstige und sehr praktische Lösung.
Manfred
 Berechtigungen
Berechtigungen
- Neue Themen erstellen: Nein
- Themen beantworten: Nein
- Anhänge hochladen: Nein
- Beiträge bearbeiten: Nein
-
Foren-Regeln
Werbung 








 Zitieren
Zitieren
Lesezeichen