








 Zitieren
ZitierenMein Display und der Eingabetaster wurden geliefert.
Die Frequenzeinstellung funktioniert schon so weit.
Die Features kommen nach und nach hinzu.

Ein Bild vom Versuchsaufbau, noch ohne Ausgangsfilter und Verstärker.
Oben Mitte das Display ( Ist in Wirklichkeit schärfer als auf dem Bild ).
Unten Mitte Rechts die Eingabetastatur.
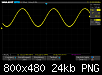
Ein Oszillogramm, 2MHz direkt am Ausgang des AD9833 aufgenommen.
Sieht IMHO auch ohne Filter schon ziemlich gut aus.



Lesezeichen