








Sodele.
Inzwischen habe ich noch ein bisschen mit dem Display gespielt- und es gibt einige Erkenntnisse:
1.: wenn mans _richtig_ anschliesst, funktioniert die Sache mit dem Kontrast per PWM _besser_.
Ich hatte doch tatsächlich den 5V der LED-Beleuchtung an den Kontrastpin angeschlossen-daher das Geflackere.
2.: der Plan geht auf: ich kann im Bedarfsfall die AltSoftSerial-Bibliothek benutzen (die normale SoftSerial ist recht...unzuverlässig), da es kein Problem ist, die Pins 8 und 9 dafür freizuhalten.
3. man _könnte_ den CS-Pin auch noch frei bekommen, indem man den entsprechenden Pin vom Display einfach auf 5V legt- funktioniert!
Ob es ne gute Idee ist, weiss ich nicht....
Das hätte z.B. die Einschränkung, dass man dann den SPI-Bus nicht noch für andere SPI-Geräte benutzen kann. Da es ausreichend freie Pins geben wird, lass ich den CS auf Pin 10, und gut.
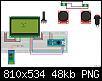
Das Display braucht trotzdem insgesamt nur vier Pins: Kontrast (12), CLk(13), MOSI(11) und CS(10).
Ist doch ganz erträglich.
Ich häng mal das Anschlusschema an. Der Übersicht wegen hab ich mal die ganzen Leitungen für die Eingabegeräte und das BT-Modul rausgenommen.

 Zitieren
Zitieren

Lesezeichen