




da sitzt man fassungslos vor'm monitor und staunt. Faszinierend, hätte mr.Spock gesagt...




da sitzt man fassungslos vor'm monitor und staunt. Faszinierend, hätte mr.Spock gesagt...
gruß inka
werden die Bewegungsmuster in etwa vergleichbar sein mit Robonova, nur eben größer?
Hallo,
musste mir gerade erstmal den Roboter anschauen. Von der Kinematik des Laufapparater her nein, von der Möglichkeit sich Fortzubewegen ohne sich durch einen dynamisch zu durchschreitenden Bereich fallen zu lassen ja.
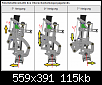
Das Bein des Konstruktionsentwurfes hat unten aufgrund seiner Kinematik aus dem Tripod und dem Achskreuz die Eigenschaft sich mit zunehmender seitlicher Gewichtsverlagerung leicht nach außen zu drehen. Der Winkel ist so gewählt, dass das schräg gestellte Achskreuz für das freie Stehen auf einem Bein und der bisher realisierte Knöchel mit dem Kugelgelenk für die schlürfende Fortbewegung das gleiche Verhalten haben.
Dadurch das das Bein in der Hüfte zusätzlich drehbar gelagert ist kann die Verdrehung ausgeglichen oder mit der Drehachse die Richtung geändert werden.
Auch vom Arbeitsbereich der Arme kann der Roboter nicht über seinen Kopf fassen.
Geändert von Marcel D (24.02.2020 um 19:45 Uhr)
Das Video zum Zusammenbau der Hüfte ist fertig.
https://www.youtube.com/watch?v=DG3y6YIbm4s
In der Hüfte sind die Funktionen zum Neigen und Drehen der Beine untergebracht.
Hierdurch kann der Schwerpunkt seitlich von einem Bein auf das andere verlagert werden.
Aufgrund der hohen Kraft, die beim Stand auf einem Bein nötig ist um den Restkörper über dem Standbein bewegen zu können ist eine Kniehebelkinematik im Oberschenkelnneigungsgelenk untergebracht.
Und das vom Torso und Kopf:
https://www.youtube.com/watch?v=ZcU22dXiJ38

Feinste Schmiedearbeit!
Wirklich superschön, und auch ziemlich clever gelöst.
Ich wünsch dir wirklich, dass du den zum Leben erwecken kannst, das ist ja schon optisch ne Augenweide!
Leider befürchte ich, dass du nicht allzuviel Hilfe von anderen bekommen wirst, denn, auch wenn du die Baupläne freigibst, wird der wohl bei _den_ Kosten (wenn man sich die Teile anfertigen lassen muss, wie die meisten Leute, wird man weit im fünfstelligen Bereich landen) nur für ganz wenige interessant sein.
Aber mach bitte weiter- das dritte Video schau ich mir heute abend an.
Ganz grosses Kino. =D>
Grüssle, Sly
..dem Inschenör ist nix zu schwör..
ich finde es auch ungeheuer beeindruckend, absolutes Profi-Niveau.
Nachbauen werde ich es aber niemals können (und wohl auch fast alle anderen hier nicht) - dazu bräuchte man Standardbaukastenteile zum Zusammenschrauben...
Geändert von HaWe (02.03.2020 um 14:43 Uhr) Grund: typo
Hallo Miteinander,
der Plan ist erst einmal die Videos über den mechanischen Aufbau fertig zu stellen und dann das dazugehörige CAD-Modell hochzuladen. (Anschließend wird die Elektronik angegangen.)
Was die Idee des Open-Source-Projekts betrifft, so ist mir klar, dass nicht jeder die Möglichkeit hat sämtliche Teile selbst herzustellen und somit die Kosten in einem überschaubaren Rahmen zu halten. Allerdings ist man ja nicht an den Entwurf, so wie er gerade ist gebunden.
Ich setze gerne auf eine gemeinsame Schwarmintelligenz, da mehrere Personen, die sich etwas überlegen, immer zu einem besseren Ergebnis kommen werden, als eine Einzelperson. Sei es, dass hierdurch bessere Lösungsansätze für die Kinematik oder eine kostenoptimierte Konstruktion, die sich beispielsweise Drucken lässt, entwickelt werden. Wenn man gemeinsam verschiedene Lösungskonzepte erarbeitet und optimiert ist das für alle hilfreich, die sich für das Thema interessieren und sich einen Roboter in dieser Art bauen wollen. Hier im Forum habe ich schon einige Beiträge gesehen, die sich mit dem Thema "Humanoide Roboter" befassen.
Wenn jemand einen Roboter in dieser Größe aufbauen will müssen die Teile entweder zu kaufen (Druckteile?) oder mechanisch selbst herstellbar sein. Das Verwenden von Standardbaukastenteilen ist meiner Meinung nach schwierig, da es sich beim Roboter um eine speziell angepasste Konstruktion handelt. Standardsysteme, die für Alles verwendet werden können, haben wegen ihrem modularen Aufbau die Eigenschaft eine globige Baugruppe zu bilden, die man viel schöner mit einer speziellen Lösung abdecken könnte.
nun, man hat ja schon funktionsfähige Bugatti Chiron im Maßstab 1:1 mit LEGO und auch humanoide Robots in Menschengröße (ansatzweise) mit PITSCO TETRIX gebaut...: wenn also das Baukastensystem vielseitig genug ist, dann wäre sicherlich vieles möglich...Zitat von Marcel D

https://www.youtube.com/watch?v=ImUMHbmQOoQ
https://www.youtube.com/watch?v=ML7H12psSEI
@Marcel D / @HaWe,
was mich interessieren würde: gibt es informationen über preise? Kann man die kosten für so einen teilesatz / bausatz (also LEGO nicht unbedingt, aber diese PITSCO TETRIX und Marcel's teilesatz) grob abschätzen?
gruß inka
 Berechtigungen
Berechtigungen


 Zitieren
Zitieren
Lesezeichen