







Hallo,
damit es hier weitergeht die Aufführung der ersten Gedanken zur Umsetzung der Elektronik.
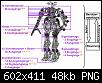
An den verschiedenen Stellen sind folgende Aktoren und Sensoren verbaut, die größtenteils die entsprechend markierten Ein- und Ausgänge benötigen. Für die Schrittmotoren muss noch ein Enable-Signal gesetzt werden. Hierbei sollen aber mehrere Motoren eines Gliedmaßes, die sich gleichzeitig bewegen auch gleichzeitig aktiviert werden.
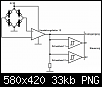
Die Endstufen selbst sind standardmäßig aufgebaut. An den Beinen soll es vorsichtshalber noch ein Signal zur Stromüberhöhung durch variieren der Referenzspannung geben, falls mal kurzfristig etwas mehr Kraft benötigt wird. Dies wird dadurch erreicht, dass im Normalbetrieb ohne Stromüberhöhung der zweite Transistor leitend ist. Wird das Signal für die Stromüberhöhung gesetzt, so wird der vorgeschaltete Transistor leitend und die Spannung an der Basis des zweiten fällt ab, wodurch dieser sperrt. Somit wirkt nur noch der erste Spannungsteiler auf die Referenzspannung, wodurch diese angehoben wird und ein höherer Strom fließt, bis am Shunt der Wert der Referenzspannung erreicht wird.

Die Gleichstrommotoren der Hände werden lediglich über H-Brücken angesteuert. Durch eine zusätzlich vorgeschaltete Spannungsquelle können unterschiedliche Spannungen eingestellt und somit die Greifkraft beeinflusst werden. Die Grenzen des Bewegungsbereiches werden durch Lichtschranken an den Fahnen in der Hand gebildet. In Schließrichtung verfügt jeder Finger über ein separates Signal. Die Öffnung erfolgt über ein gemeinsames Signal. Will man einen Finger nicht mit Öffnen, so reicht es aus hierbei zeitgleich das Schließsignal zu setzen um beide Seiten des Motors auf das gleiche Potential zu ziehen.

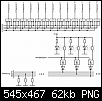
Dieses Bild stellt den Abfragebus dar. Da lediglich Signalbereiche der einzelnen Aktoren abgefragt werden und der Rest über Mitzählen interpoliert wird ist es nicht nötig zeitgleich alle Lichtschranken abzufragen. Deshalb gibt es zwei Bussysteme (rechte und linke Seite). Durch die UND-Verknüpfungen zur Erzeugung des Abfragesignals wird auch gewährleistet, dass immer nur ein Aktor abgefragt werden kann, wodurch es nicht zeitgleich zu Signalüberlagerungen mehrerer Aktoren kommen kann. Die Positionsbereiche die Abgefragt werden können haben die Anordnung 000, 001, 011, 010, 110, 100, 101 und 111. Hierdurch ändert sich an den Übergängen immer nur 1 Bit und es kann nicht zu Sprüngen in der Messung kommen.
Die Drucksensoren selbst verfügen über zwei Abfragevarianten. Zum einen gibt es die analoge Abfrage, die für die Lernphase verwendet werden soll, zum anderen die digitale Abfrage, die zum Einsatz kommt, wenn keine so große Auswertung im Hintergrund laufen soll. Diese soll lediglich über Schmidttrigger erkennen ob kein, niedriger oder starker Druck auf die Kontaktplatten wirkt.
Der Neigungssensor selbst ist ein fertiges Teil.
Grüße
Marcel

 Zitieren
Zitieren




Lesezeichen