







 Zitieren
ZitierenDas Video zum Zusammenbau der Hüfte ist fertig.
https://www.youtube.com/watch?v=DG3y6YIbm4s
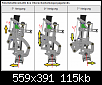
In der Hüfte sind die Funktionen zum Neigen und Drehen der Beine untergebracht.
Hierdurch kann der Schwerpunkt seitlich von einem Bein auf das andere verlagert werden.
Aufgrund der hohen Kraft, die beim Stand auf einem Bein nötig ist um den Restkörper über dem Standbein bewegen zu können ist eine Kniehebelkinematik im Oberschenkelnneigungsgelenk untergebracht.





Lesezeichen