




 Zitieren
Zitierenklar sind für Gehversuche und kurze Tests auch mal 2300mAh erlaubtZitat von eniddelemaj

Zu L298n 5v regulator kann ich nichts sagen: kenne ich nicht, habe ich nicht, nutze ich nicht.



Ah okay. Ich werde berichten. Würden auch 6x 1.2 v á 2300 mAh gehen? Das Problem ist, dass ich gerade nur 4 von den 2600 mAh zuhause habe. Ich habe zwar 4 weitere, aber die sind bis donnerstag für mich nicht erreichbar. Ich habe aber gerade 6 1.2v á 2300mAh parat. Gehen die auch oder wäre das sinnlos?
- - - Aktualisiert - - -
Mir ist noch eingefallen, dass der motorcontroller (L298n) einen 5v regulator hat. Ist das das gleiche oder was anderes? Wäre das das gleiche hätte unser vorhaben ja keinen effekt oder?
klar sind für Gehversuche und kurze Tests auch mal 2300mAh erlaubt
Zu L298n 5v regulator kann ich nichts sagen: kenne ich nicht, habe ich nicht, nutze ich nicht.
Quelle: https://tronixlabs.com.au/robotics/m...-2a-australia/Es gibt auch einen integrierten 5-V-Regler. Wenn Sie also die Motoren mit 7 bis 12 V DC betreiben, kann das Modul Ihren Arduino (usw.) auch mit 5 V DC versorgen.
Dazu müssen aber die Motoren sauber entstört sein. Dann gehen lange, verdrillte Kabel von dem Motor zum Modul. An dem 5V-Regler kann man dann 5V abgreifen.
und wozu, wenn doch der Arduino stabiliserte 5V selber hat?
Weil der Regler da mit auf dem Board drauf ist. Er wollte nur wissen, ob man den verwenden kann, für irgendwas. Er hat da noch einen 5V-Regler.
Wie ist das jetzt, wird der Arduino direkt mit 4,6V betrieben, ohne Nutzung des Spannungsreglers?
ja, hat er doch geschrieben! Wenn er 4x12V hat,würde ja auch nur ein stepup-Regler funktionieren, kein stepdown wie per L298 zu vermuten.
Also machte der 5V Regler an dem Motorcontroller keinen Sinn, da die Versorgungsspannung unter 5V lag
und da nichts "zu regeln" war? Eben weil es ja ein Step down Regler ist. Und sonst kann ich auch den Regler
des Motorcontrollers verwenden richtig? Der Vorteil bei dem Motorcontroller ist, dass ich die Kabel der Batteriehalterung, einfach in die Klemmen des Motorcontrollers stecken kann. Bei dem Arduino bräuchte ich
einen Stecker für die DC-Buchse.
Naja ich habe jetzt die 6x 1.2V á 2300mAh ausprobiert und ich glaube ehrlich gesagt,
dass das zu viel sein muss. Die Motoren drehen sich unglaublich schnell. Jetzt macht mein
Programm auch keinen Sinn mehr, da sich der Roboter so schnell dreht, dass die Yaw Messung
keinen Sinn mehr macht. Er dreht sich einfach unaufhörlich weiter, weil der Wert ständig übersprungen wird.
(Übrigens: Der Schaltplan ist immer noch der gleiche außer, dass jetzt 6x 1.2V á 2300mAh verwendet werden.
Also der L298n ist immer noch an die Stromquelle angeschlossen, nicht der Arduino.)
Der MPU arbeitet allerdings normal. Also ich kann immer noch einen Winkel ermitteln. Ob der Yaw Wert
immer noch springt konnte ich leider nicht heraus kriegen, eben weil die Motoren sich viel zu schnell drehen.
Wenn ich jetzt annehme, dass die 6 1.2V zu viel sind, verstehe ich das trotzdem nicht.
Wie können nur 4x 1.2V Akkus den Roboter ausreichend versorgen, wenn schon der Arduino 5V verbraucht?
Was mache ich jetzt? Ich bin wirklich optimistisch eine Lösung zu finden und ich bin richtig froh, dass mir hier
so geholfen wird!
Eine Idee die ich hätte wäre einen Potenziometer zwischen die Stromquelle und den L298n zu schalten. Ich kenne
die Funktion eines Potenziometer (Also die Regelung der Spannung per Hand), aber ich habe damit noch nie gearbeitet.
Wäre das eine Lösung?
Oder vielleicht benutze ich Wiederstände, um auf eine etwas niedrigere Spannung
zu kommen.
Wie viel V brauche ich eigentlich ? Rechnet sich das so?:
5V Arduino + 2* 3-9V Motoren + 3.3V MPU = 11.3 - 17.3V.
Geht das so?
Geändert von eniddelemaj (27.11.2018 um 21:11 Uhr)
Nein, regle die Motoren per pwm zurück ( analogWrite(pin, 127) ).
Schließe den Arduino an den Batterien über die DC Buchse oder Vin (!) Pin an, denn die sind genau dafür stabilisiert!
Vergiss den L298 Regler, denn der kann wieder von der Motorleistung negativ beeinflusst sein!
Aber zum Test:
was passiert, wenn die Motoren laufen, und du den Robot in der Hand hältst und drehst?
Das ist ja erst mal die entscheidene Frage.
Was macht dein yaw bei exakt manuellen 180° Drehung hin und zurück?
Sind das diese Getriebemotoren?
Hier wären die Daten aus dem Datenblatt dazu:
Spannung DC V 4,5 - 6 - 7,2 - 9
Stromstärke Leerlauf mA 190 - 160 - 180 - 200
Drehzahl pro Minute im Leerlauf +- 10% 90 - 190 - 230 - 300
Drehmoment gf/cm min. 800 - 800 - 1000 - 1200
Deine ganze Beschaltung benötigt für den Arduino an der DC-Buchse 7 bis 9V. Am Arduino sind Spannungen rausgeführt, 3.3V und 5V. Daran kann man Erweiterungsplatinen anschließen. DC-Motoren lassen sich i.R. nicht direkt am Arduino betreiben, weil die zu viel Strom aufnehmen, wie oben zu sehen ist, bis 200mA - im Leerlauf. Bei Belastung würde ich von bis zu 400mA ausgehen. Aus dem Grund kommt ein Motortreiber-Baustein hinzu. Der Baustein wird mit dem Arduino angesteuert und erhält eine extra Versorgungsspannung für die DC-Motoren, die von der Versorgungssspannung vom Arduino abweichen kann, aber nicht muss. Es kann auch dieselbe Versorgungsspannungsquelle sein. Wie man aus der Tabelle sieht, drehen die Motoren bei 7.2V Versorgung mit 230u/min, statt 90u/min bei 4.5V. Das ist 2.5mal so schnell.
Allerdings sind die 4.5V für den Arduino zur Versorgung etwas zu wenig. Das sollten tatsächlich mehr als 6V (7.2 z.B. sein). Wenn die Motoren zu schnell drehen, kann man die mit dem Arduino per PWM in der Drehzahl steuern, über den Motortreiber. An den Motoren ist scheinbar nichts entstört. Wo hängt die Sensorplatine mit der Versorgung dran, direkt am Motortreiber und der Arduino auch?
Ich denke, Du kannst die 6*1.2V 2300mAh schon verwenden. Man muss nur daran denken, dass "normale" Akkus ihre Gesamtleistung nicht so schnell abgeben können, dann würde die Spannung am Akku sinken. Bei LiPo ist das was anderes, da kann ein 3000mAh-Akku durchaus die 3000mA und mehr in sehr kurzer Zeit abgeben, der ist dann nur schnell leer.
Überschlagsweise Leistungsberechnung - nicht unbedingt meine Stärke
Code:Motorenleistung: 2x 400mA*7.2V = 5760mW Arduinoleistung: 100mA*5V = 500mW Sensorplatine Leistung: 50mA*5V = 250mW Gesamt: 6510mW Batterien: 7.2V*2300mA=16560mW (Bitte berichtigen, wenn ich falsch gerechnet habe.)
Aber Du musst diese ingesamt 7.2V am Arduino an der DC-Buchse anschließen. Die Sensorplatine versorgst Du vom Arduino mit 5V oder 3.3V - wie es nötig ist. Der Motortreiber bekommt zum einen die 7.2V aus den Batterien. Der Arduino steuert den Motortreiber per Digital-Ausgang. Per PWM wird die Geschwindigkeit der Motoren geregelt.
Und nein, die Spannungen für die einzelnen Baugruppen summieren sich nicht auf, nur die Leistung die die einzelnen Komponenten brauchen. Die Spannung bleibt bei max. 7.2V für die Motoren und für den Arduino wird die Spannung über den Spannungsregler auf dem Arduino-Board auf 5V runtergeregelt (zusätzlich werden auf dem Board 3.3V erzeugt, so dass an dem Board 2 Spannungen für Erweiterungen zur Verfügung stehen).
MfG
Geändert von Moppi (28.11.2018 um 08:20 Uhr)

Mir ist ein Punkt aufgefallen, das deutlich unterschiedliche Verhalten bei 6x1,2V und 4x1,2V.
Der L298N benötigt eine Versorgungsspannung an pin 4 von V IH+2,5V mit V IH min = 2,3V.
Das wird mit vier realen Akkus im Betrieb sicher etwas knapp.
Ich bin nicht sicher ob es daran liegt, aber es ist wohl ein kritischer Punkt.
Datenblatt: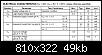
 Berechtigungen
Berechtigungen

Lesezeichen