







Da lag der Wurm! Ground verbunden, aber nur "optisch", durch eine schlechte Lötstelle fehlte der Kontakt.Zitat von shedepe

Hab mich schon 2 Wochen mit dem Ding herumgeärgert, am C direkt daneben herumgelötet, und diese Stelle immer übersehen....
Der NE555 schickt sicher keine 5khz raus, das wäre nahe am Tinnitus, aber man hört die leisen Knackser mit Minipausen.
Mein Mulitmeter zeigt auch gerade 0.1khz an.
Aber jetzt soll das Sendersignal über den µC gesteuert werden damit man es mit digitalen Filter störungssicher erkennen kann.
So sah der Empfänger das Signal ohne diese Verbindung:
Eine Periode immer 20ms, oben abgeschnitten da der Eingangspegel zu hoch wurde, immer gleich egal was ich am Sender verstellte...
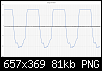
So mit richtiger Lötstelle:

Sendersignal 1-0-1-0-0, Sample alle 100µs.
Jetzt muss ich noch mit dem Korrelationsfilter herumspielen um das Signal sicher zu erkennen

 Zitieren
Zitieren
Lesezeichen