-
 Werbung
Werbung
-
Erfahrener Benutzer
Begeisterter Techniker

Das ist ja eine geile Konstruktion !

Hast Du Zeichnungen davon zum Nachbauen ?
-
Neuer Benutzer
Öfters hier

Jetz habe ich es es endlich auch gesehen, absoluter Kracher 
Sieht zur Funktion auch noch niedlich aus.
-
Neuer Benutzer
Öfters hier
Hallo
Ist ein wirklich gelungenes Tierchen - Respekt!!! Kannst du vielleicht eine Prinzipskizze posten in der du die Mechanik näher erläuterst? Der Lösungsansatz ist wirklich sehr gut und verdient unters Volk gebracht zu werden. Danke im Voraus.
harri
-
Neuer Benutzer
Öfters hier
Das ist ja eine geile Konstruktion !

-
Erfahrener Benutzer
Roboter-Spezialist
Ich werde demnächst mal mehr posten, bin aber gerade zu busy mit anderen Sachen, Sorry!
-
Erfahrener Benutzer
Roboter-Spezialist
So, wie versprochen etwas mehr Material. Erstmal ein Rundumblick:




Wie man sieht, gibt es quasi fünf Etagen. Ganz oben drauf ist die Elektronik, wie schon gesagt ohne Microcontroller oder ähnliches. Es sind lediglich ein normaler RC-Empfänger mit 6 Kanälen, wovon aber nur 3 benutzt werden, und ein einfacher Vorwärts-Regler für den Antriebsmotor. Der Regler is ein alter Kontronik-Flugregler und hier gnadenlos unterfordert, aber war halt da. Der Empfänger gehört zu meiner ersten Fernsteuerung, einer Simprop Star 12, über 30 Jahre alt. Ach ja, und ein kleiner billiger NiMh mit 6 Zellen.
Eine Etage darunter liegt im wesentlichen ein Untersetzungsgetriebe für den Antriebsmotor. Das ganze Gewusel wird nur von einem relativ niedrigdrehenden 380er-Klon angetrieben.

Von dort gehen zwei senkrechte Wellen nach unten. Eine geht nur eine Etage tiefer zum Antrieb der Wackel-Servos, die andere geht bis ganz unten durch und treibt den Mechanismus zum Beinchenheben an.
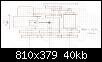
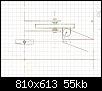
Der Antrieb für die Wackel-Servos erfolgt durch zwei gegenläufige Zahnräder, die gleichzeitig als Kurbeln fungieren und über Koppelstangen die oszillierende Bewegung der Servos erzeugen. Das eine Zahnrad wird direkt von oben über die Welle angetrieben und das zweite vom ersten über die Verzahnung. Dadurch ergibt sich ein symmetrischer Bewegungsablauf mit gleichen Winkeln und Hüben links und rechts. Diese Bewegung hat noch nichts mit dem Servoausschlag zu tun, sondern es werden die ganzen Servos um einen Lagerpunkt geschwenkt, der bei Servoausschlag "Null" mit dem Anlenkungspunkt am Servohorn zusammenfällt.


Bei Servostellung "Null" hat die oszillierende Bewegung der ganzen Servos also keine weiteren Folgen, da sich der Abtrieb am Servo nicht bewegt. Erst wenn ein Servo ausgeschlagen wird, gibt es auch einen Längshub, der links und rechts durch je eine Koppelstange auf die weißen Kunststoffhebel übertragen wird, die dann ihrerseits das mittlere Bein auf jeder Seite bewegen. Das vordere und hintere Bein auf jeder Seite werden dann durch die großen Zahnräder automatisch gegensinnig mitbewegt.

Das Beinchenheben wird durch drei Kurbeln auf der Unterseite erledigt, die von einer Zahnradkaskade oberhalb der untersten weißen Kunststoffplatte angetrieben werden. Diese Zahnradkaskade wird wiederum von der langen Welle von oben direkt vom Antriebsgetriebe angetrieben. Je Beinpaar gibt es eine Kurbel, es also auf jeder Station immer ein Bein oben und eines unten (es sei denn, es sind gerade beide auf gleiche Höhe)

Das Gehen kommt nun dadurch zustande, daß erstens die Beine rauf und runter gehen und zweitens eine synchrone phasenversetzte Längsbewegung durch die oszillierenden Servos erzeugt wird. Der Hub dieser Längsbewegung wird durch den Auschlag der Servos von voll negativ (=rückwärts) bis voll positiv (=vorwärts) gesteuert, und zwar links und rechts getrennt. Dadurch kann der kleine Krabbler alles, was auch ein Kettenfahrzeug oder Radfahrzeug mit Skid Steer kann: Vorwärts, Rückwärts, Kurven und auf der Stelle drehen. Die beiden Servos habe ich auf den V-Mischer im Sender gelegt, so kann ich die Schabe bequem über einen Kreuzknüppel steuern. Über den Gasknüppel wird die Motordrehzahl gesetzt, ich kann also das gleiche Tempo z.B. mit kleiner Drehzahl und großen Schritte oder mit viel Drehzahl und kleinen Schritten gehen.
Geändert von hbquax (21.10.2017 um 14:03 Uhr)
-
Erfahrener Benutzer
Roboter-Spezialist
Die wesentlichen Elemente der Kinematik, also das Untersetzungsgetriebe, den Oszillationsantrieb und den Längsantrieb für die Gehbewegung, habe ich nur mit Geodreieck und Zirkel auf Karopapier konstruiert. Den Hubantrieb habe ich dann ohne Zeichnung, direkt vom Kopf in die Hand, während des Bauens entwickelt.



Material:
Alte Mehrkanal-RC-Anlage, einfacher Flugregler, NiMh-Akku & 380er Motor aus der Restekiste
Gelbe Kunststoffzahnräder Modul 1, in Einfach- und Doppelausführung in div. Sortimentsbeuteln (Conrad)
Erste Getriebestufe (graue Zahnräder) aus einem alten Graupner-Boots-Getriebe
Wellen 4 mm Silberstahl, in Bundbuchsen aus Sinterbronze gelagert (Conrad)
Platten aus 3 mm ABS
Kugelgelenke, Gabelköpfe, Umlenkhebel hauptsächlich Conrad, teilw. Reste von Tamiya & Co, ist aber eigentlich egal...
Sechskant-Abstandshülsen M3 (Conrad)
Aluprofile und Gewindestangen (Baumarkt)
- - - Aktualisiert - - -
Technisch inspiriert ist das ganze übrigens hierduch:
https://de.wikipedia.org/wiki/Heusinger-Steuerung
Geändert von hbquax (22.10.2017 um 10:24 Uhr)
-
echt professionell gelöst, bin wirklich beeindruckt!

 Berechtigungen
Berechtigungen
- Neue Themen erstellen: Nein
- Themen beantworten: Nein
- Anhänge hochladen: Nein
- Beiträge bearbeiten: Nein
-
Foren-Regeln
Werbung 








 Zitieren
Zitieren
Lesezeichen