-
 Werbung
Werbung
-
Erfahrener Benutzer
Roboter-Spezialist
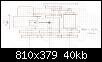
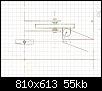
Die wesentlichen Elemente der Kinematik, also das Untersetzungsgetriebe, den Oszillationsantrieb und den Längsantrieb für die Gehbewegung, habe ich nur mit Geodreieck und Zirkel auf Karopapier konstruiert. Den Hubantrieb habe ich dann ohne Zeichnung, direkt vom Kopf in die Hand, während des Bauens entwickelt.



Material:
Alte Mehrkanal-RC-Anlage, einfacher Flugregler, NiMh-Akku & 380er Motor aus der Restekiste
Gelbe Kunststoffzahnräder Modul 1, in Einfach- und Doppelausführung in div. Sortimentsbeuteln (Conrad)
Erste Getriebestufe (graue Zahnräder) aus einem alten Graupner-Boots-Getriebe
Wellen 4 mm Silberstahl, in Bundbuchsen aus Sinterbronze gelagert (Conrad)
Platten aus 3 mm ABS
Kugelgelenke, Gabelköpfe, Umlenkhebel hauptsächlich Conrad, teilw. Reste von Tamiya & Co, ist aber eigentlich egal...
Sechskant-Abstandshülsen M3 (Conrad)
Aluprofile und Gewindestangen (Baumarkt)
- - - Aktualisiert - - -
Technisch inspiriert ist das ganze übrigens hierduch:
https://de.wikipedia.org/wiki/Heusinger-Steuerung
Geändert von hbquax (22.10.2017 um 10:24 Uhr)
-
echt professionell gelöst, bin wirklich beeindruckt!

-
Erfahrener Benutzer
Begeisterter Techniker

Sehr schön gemacht und beschrieben hbquax !
Vielen Dank.
Darf ich doof fragen ob es CAD Daten dazu gibt?
LG Jørgen
-
Erfahrener Benutzer
Roboter-Spezialist
Gibt es nicht, deswegen ja die eingescannten Skizzen.
Schönen Sonntag

Nils
 Berechtigungen
Berechtigungen
- Neue Themen erstellen: Nein
- Themen beantworten: Nein
- Anhänge hochladen: Nein
- Beiträge bearbeiten: Nein
-
Foren-Regeln
Werbung 








 Zitieren
Zitieren
Lesezeichen