








Hier noch mal als Denkanstoß, damit es eben keine Totgeburt wird ein Denkanstoß.
Mal ein einfacher Ansatz um Startwerte für einen humanoiden Roboter zu haben.
Dichte von Stahl = 7,85kg/dm³
Dichte von Aluminium = 2,7kg/dm³
Volumen eines durchschnittlichen erwachsenen Menschen = 750dm³
Masse, masiv aus Stahl = 5887,5kg
Masse, masiv aus Alu = 2025kg
Geht mal also davon aus das der Körper massiv aus Alu besteht, hat man eine maximale obere Masse festgelegt.
Mit der erstellt man sich sein Berechnungsgerüst z.B. in Excel.
F=m*g
F=2025kg*9,81m/s²
F=19865,25N
Davon ausgehend, das der Roboter als Bipedales System seine gesammte Masse mit einem Bein stemmen können muß,
kann man also die resultierende Kraft als wirkende Gewichtskraft für ein Bein nehmen.
Kolbendurchmesser = 50mm
A=r²*Pi
Kolbenfläche = 1962,5mm²
Wenn ein Bein nicht mehr als 12-15cm Durchmesser haben soll und man ja auch Platz für eine Stützstruktur braucht,
kann man die Kolbendurchmesser einfach mal auf 50mm als Obergrenze festlegen. Da kommt ja noch die Zylinderwand und die Zylinderenden dazu.
p=F/A
p=19865,25N/1962,5mm²
p=10,12N/mm² = 101,2bar
Das wäre für den einfachen Fall, im Bild links.
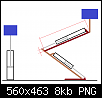
Ein Bein hat aber Drehgelenke und faltet sich am Knie zusammen wenn es sich beugt.
Das heist wir haben Drehmomente und Hebelarme.
Greift also die Kolbenstange 50mm von der Drehachse entfernt an, hat l1=50mm.
Ist der Oberschenkel z.B. 400mm lang ist l2 400mm.
Das Verhältniss ist 50mm:400mm = 1:8
Im ungünstigsten Fall muß der Zylinder also 1986,25N * 8 = 15890N bewegen.
Das wären dann bei an sonsten gleichen Werten 809,6bar.
Jetzt sollte der Roboter nicht unbedingt über 2 Tonnen wiegen, und man hat ja schon mal ein paar wenige Informationen von bestehenden Systemen wie dem Mad Dog.
Nimmt man dessen 206 bar und rechnet mal von 200 bar rückwärts, kommt man auf eine maximale Gesamtmasse von rund 500kg.
Jetzt nimmt man diese neue Obergrenze für die Masse und rechnet erneut.
Um aus der Hocke ausfzustehen müssen zwei mal Fuß- zwei mal Knie- und zwei mal Hüftzylinder mit Hydraulikflüssigkeit gefüllt werden.
Dazu kommen bei Schräglage noch je zwei weitere seitliche Zylinder an den Hüften und den Fußgelenken.
Eine gewisse Reserve für Schulter, Ellenbogen und Handgelenk muß man auch haben, da die ggf. eine Ausgleichsbewegung ausführen müssen. Nimmt man also für alle Zylinder an, das sie alleine die Maximalkraft aufbringen müssen, kommt man auf ein Volumen das pro Zeiteinheit zu füllen ist.
Damit kommt man auf den Volumenstrom den die Pumpe liefern muß ohne das der Druck einbricht und hat so zwei Kennwerte um eine Hydraulikpume zu wählen.
Damit kommt man auf deren konkrete Masse und Leistungsaufnahme.
Mit der Leistungsaufnahme kann man einen Motor wählen und eine Energiequelle.
Somit bekommt man deren Masse.
Nun kann man konkrete Zylinder bei Anbietern auswählen und erhällt deren Masse und genaue Maße.
Noch passende Ventile auswählen und man hat die selben Informationen für die.
Jetzt noch die Hydraulikleitungen, deren Durchmesser duch Druck und Volumenstrom festgelegt sind.
und deren Länge man braucht.
So erhält man deren Masse (erst mal länger wählen, kürzen kann man später immer noch)
Wenn man jetzt alle Volumen von Zylindern, Leitungen, Ventilen, Pumpe etc. zusammenrechnet, kann man die Masse der Hydraulikflüssigkeit ermitteln (Speichertank und eine Reserve für Undichtigkeiten nicht vergessen)
Jetzt kann man sich an die erste Konstruktionsberechnung der Stützstrukturen machen.
Wenn man sich noch auf das Volumen des durchschnittlichen erwachsenen Menschen bezogen die Volumen der der einzelnen Gliedmaßen beschafft, und diese ins Verhältniss zum Gesammtvolumen setzt, kann man über das Verhältniss die Maximalmasse der Gliedmaßen ermitteln.
Und prüfen wie gut oder schlecht die eigene Konstruktion im Verhältniss zu dieser Referenz dasteht.
Übleicherweise wird sich bei zunehmender Konkretisierung der einzelnen Teile ergeben, das man mindestens noch ein zweites mal mit den veränderten Werten rechnet um zu prüfen ob auch wirklich alles den Beanspruchungen hällt und ggf. wo man Teile kleiner wählen kann wie bei der ersten Festlegung. Dadurch ergibt sich dann zwansläufig die Notwendigkeit eines weiteren Durchrechnens.
Das geht solange itterativ, bis alle Teile des gesamten Systems berücksichtigt sind und alles rechnerisch passt.
Danach muß man nur noch die konstruierten und berechneten Teile herstellen und die gewählten Kaufteile bestellen und kann ans Montieren gehen.
Die Softwareentwicklung ist dann allerdings ein ganz eigenes Thema.

 Zitieren
Zitieren

Lesezeichen