




Ich habe nicht gesagt, dass es zeitvariant ist?
Bei meinem System y = T(t) ist T doch ein nichtlinearer Operator oder?
Das Drehmoment ist doch = Trägheitsmoment * Winkelbeschleunigung.
Daran ist doch nichts linear, oder wo ist mein Fehler?

 Werbung
Werbung

Ich habe nicht gesagt, dass es zeitvariant ist?
Bei meinem System y = T(t) ist T doch ein nichtlinearer Operator oder?
Das Drehmoment ist doch = Trägheitsmoment * Winkelbeschleunigung.
Daran ist doch nichts linear, oder wo ist mein Fehler?

Das ist ja mein Problem. Was ist bei Dir nichtlinear? Ich weiß ja nichtmal was Du hinter dem "T" versteckt hast... Daran ist doch nichts linear ..
Vermutlich liegts an meinem beschränkten Wissen über den Umgang mit Modellen und Simulationen und ich kann Dir weder folgen noch raten.
Ciao sagt der JoeamBerg
hmm okay.
Vermutlich sehe ich etwas falsch und habe natürlich im ersten Post nicht meinen kompletten Gedankengang offen gelegt:
Der Rotor treibt ja eine Antenne an. Diese ist relativ schwer (100 kg). Die Motoren müssen dieses Gewicht doch erst in Schwung bringen, wodurch sich dieser Verlauf ergeben würde:
1. Anlaufphase
2. Lineare Phase (max. Winkelgeschwindigkeit erreicht. ~linear).
3. Bremsphase (wenig Überschwingen).
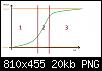
Klingt das so pausibel oder bin ich auf dem Holzweg?
Mein erster Post: "ich möchte einen PID-Regler dimensionieren und wurde natürlich in der Wiki fündigAuf alle Fälle liest Du nicht mal meine Linkempfehlung, schon ein Überfliegen hätte geholfen."
Deine Literaturempfehlung kannte ich also schon.
Deine Grafik verstehe ich nicht. Es wurde kein Arbeitspunkt eingetragen, deswegen verstehe ich die Linearisierung nicht (und selbst wenn dieser eingetragen wurde, so weiß man trotzdem nicht wie es zu diesem kam).
Was soll es mir helfen, dass du ein Alternativbild postest, welches auch noch etwas anderes zeigt?

Oberallgeiers Antwort zeigt die Übergangsfunktion eines PTn Gliedes, das wäre z.B. die Winkelgeschwindigkeit als Funktion der Spannung. In deiner Anwendung ist die Position die Regelgröße, also das Integral der Winkelgeschwindigkeit richtig? Also - die PTn Übertragungsfunktion in Laplace-Form mit 1/s oder mit 1/(Tn*s) multiplizieren und fertig ist das IntegralZitat von Kolba



In dem von mir aufgeführten Buch findet man die Infos zu Approximation einer ITn Strecke durch eine IT2 Strecke mit aus der Sprungantwort ablesbaren Parametern. Damit hast du dann schon ein sehr gutes Model zum Spielen im Simulink.
In der Praxis reicht oft schon eine noch einfachere Approximation durch IT1, die Parameter kann man sehr einfach aus der Steigung und Tangente der Sprungantwort ablesen. In dem gleichen Buch findest du ein Bildchen dazu und praktische PID Einstellregeln für IT1 Strecke.
Geändert von witkatz (26.01.2016 um 05:24 Uhr)
 Berechtigungen
Berechtigungen


 Zitieren
Zitieren
Lesezeichen