






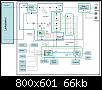
Habe das Schema überarbeitet und dem aktuellen Stand angepasst, jede Platine, bzw auch Akku ist eingegrenzt um die einzelnen Einheiten unterscheiden zu können.
Alle Sensoren werden von der Kontrollerplatine aus versorgt.
Das Ladegerät ist ein einfacher Festspannungsregler eingestellt auf 16.4V mit max 3A, weit unter der Spezifikation vom Akku. Das Laderelais wird über 2 Transistoren in Serie geschalten, somit müssen Haupt und Nebenkontroller das Laden freigeben, bzw können es unabängig von einander beenden.
Nur nutzt das nichts wenn der Nebenkontroller Mist misst.
Testfahrten nach der oben genannten Änderung steht noch aus. Manchmal fährt er tagelang ohne Absturz, dann steht er wieder alle paar Minuten.
LG!

 Zitieren
Zitieren






Lesezeichen