




Ohne Kenntnis des Schalt-/Verkabelungsplans kann ich daraus aber nichts ableiten.Zitat von damfino

mfG
Markus

 Werbung
Werbung

Ohne Kenntnis des Schalt-/Verkabelungsplans kann ich daraus aber nichts ableiten.
mfG
Markus
Tiny ASURO Library: Thread und sf.net Seite
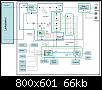
Als Schaltplan habe ich momentan nur das Hauptschema im Anhang, wurde leider nicht mehr überabeitet. Es passt im Aufbau noch, es gibt eine Platine als zentrale Stromsversorgung mit Akku und Ladestation Anschluss und allen Sicherungen sowie Anschluss des Step Down Wandlers.
Von dort geht es über Kabel weiter zur Platine mit den 2 Kontrollern. Balancer gibt es nicht mehr, ist alles im Nebenkontroller integiert, wobei nur mehr Spannungen gemessen und das Laderelais angesteuert wird. Die FETs für Load Balancing gibt es nicht mehr.
Der Leistungsteil der Motorsteuerung ist auch wieder auf einer eigenen Platine.
Die Beschaltung der Kontroller entspricht der RN-Control mit Ausnahme des Cs am AREF Pin, der geht direkt auf GND wie im Datenblatt empfohlen.
=> Stichleitungen zum Kontroller, an diesen sind nur 100nF C, der Quarz und die VCC, AVCC und GND Pins der Kontroller dran. Eine Abweichung gab es, wurde heute verbessert.
Werde das demnächst aktualisieren, dauert halt wenn man das im Powerpoint pinselt.
Heute habe ich folgendes verändert:
direkte Kabel von Stromversorgung zur Kontrollerplatine um schlechten Steckerkontakt auszuschließen.
Am GND vom Quarz hatte ich mal schnell die GND Leitung zu einem Sensor weiterverlängert, jetzt hört die GND Leitung am Quarz auf, und der Sensor hat seine eigene Leitung bekommen.
LG!
alles über meinen Rasenmäherroboter (wer Tippfehler findet darf sie gedanklich ausbessern, nur für besonders kreative Fehler behalte ich mir ein Copyright vor.)
Habe das Schema überarbeitet und dem aktuellen Stand angepasst, jede Platine, bzw auch Akku ist eingegrenzt um die einzelnen Einheiten unterscheiden zu können.
Alle Sensoren werden von der Kontrollerplatine aus versorgt.
Das Ladegerät ist ein einfacher Festspannungsregler eingestellt auf 16.4V mit max 3A, weit unter der Spezifikation vom Akku. Das Laderelais wird über 2 Transistoren in Serie geschalten, somit müssen Haupt und Nebenkontroller das Laden freigeben, bzw können es unabängig von einander beenden.
Nur nutzt das nichts wenn der Nebenkontroller Mist misst.
Testfahrten nach der oben genannten Änderung steht noch aus. Manchmal fährt er tagelang ohne Absturz, dann steht er wieder alle paar Minuten.
LG!
Geändert von damfino (26.05.2014 um 09:20 Uhr)
alles über meinen Rasenmäherroboter (wer Tippfehler findet darf sie gedanklich ausbessern, nur für besonders kreative Fehler behalte ich mir ein Copyright vor.)
Ist die Verkabelung auch wirklich genau so? Grund: Um Masseprobleme via Ferndiagnose überhaupt erraten zu können muss der Leitungsplan natürlich auch exakt stimmen. Was aber hier schon auffällt: Prinzipiell besteht nach der aktuellen Zeichnung die Möglichkeit, dass der Step-Down im Ladebetrieb keine saubere Masse mehr bekommt. Grundsätzlich solltest du alle Komponenten an einem zentralen Sternpunkt mit Masse verbinden, damit Ströme die entlang deiner Masseschiene fließen nicht zu einem Spannungsabfall entlang der Leitung führen. Dann sehen die verschiedenen Module nämlich auch unterschiedliche Masse-Potentiale!
mfG
Markus
Tiny ASURO Library: Thread und sf.net Seite
Hallo Markus,
ja, der Plan entspricht dem Aufbau.
Das heisst es sollen die GND Leitungen von Ladestation, Lader, Step Down, im GND Punkt anschlossen werden?
Momentan entspricht der GND Punkt eher einer 10cm langen Masseschiene, auf der einen Seite der Akku Anschluss, am anderen Ende gehts weiter zu den Motoren, hatte darauf geachtet keine Verluste bis zu den Motoren zu haben, aber Lader und Ladestation wurden erst später dazu gebastelt.
Der Hauptkontroller misst aber immer richtige Werte, nur der Nebenkontroller auf der gleichen Platine misst falsch.
Werde alle Masseleitungen nachmal durchsehen und ändern!
LG!
alles über meinen Rasenmäherroboter (wer Tippfehler findet darf sie gedanklich ausbessern, nur für besonders kreative Fehler behalte ich mir ein Copyright vor.)

Es gibt auch Softwarefehler.
Geändert von PICture (26.05.2014 um 11:11 Uhr)
MfG (Mit feinem Grübeln) Wir unterstützen dich bei deinen Projekten, aber wir entwickeln sie nicht für dich. (radbruch) "Irgendwas" geht "irgendwie" immer...(Rabenauge) Machs - und berichte.(oberallgeier) Man weißt wie, aber nie warum. Gut zu wissen, was man nicht weiß. Zuerst messen, danach fragen. Was heute geht, wurde gestern gebastelt. http://www.youtube.com/watch?v=qOAnVO3y2u8 Danke!
Softwarefehler sind immer möglich, vor allem bei tausenden Zeilen Code...Habe dazu schon einges verbessert um einen Software Reset auszuschließen, wie etwa bei Array Zugriff immer zu überprüfen ob die Array Grenzen eingehalten werden. Ebenso mal die Stackgröße im laufendem Programm überwacht, da war noch mehr als 1kB SRam frei.
Hier schwanken aber auch die ADC Rohwerte wenn eine Ladespannung anliegt, nur dem Hauptkontroller ist das egal.
Wie gesagt, ich hab einen sehr hochohmigen Spannungsteiler (157k/47k) um die Zellenspannungen zu messen, damit auch mal über 2-4 Tage lang der Akku kontrolliert werden kann ohne dass er alleine durch den Spannungsteiler entladen wird. Die Elektronik selbst sollte in dieser Zeit nach obiger Schaltung durch die Ladespannung versorgt werden. Ziel ist eine einfache Überwachung auf Unter/Überspannung, wenn notwendig soll der Akku extern geladen und balanciert werden.
Vielleicht ist das zu hochohmig?
LG!
alles über meinen Rasenmäherroboter (wer Tippfehler findet darf sie gedanklich ausbessern, nur für besonders kreative Fehler behalte ich mir ein Copyright vor.)
Ja. Die Masseschiene geht denke ich schon in Ordnung, außer du hast so extrem hohe Motorströme dass dort messbare/signifikante Spannungsabfälle auftreten können. Das gleiche gilt auch für deine Kontrollerplatinen, die Versorgung aller wichtigen Verbraucher sollte von einem gemeinsamen Referenz-/Sternpunkt abgehen.
mfG
Markus
Tiny ASURO Library: Thread und sf.net Seite
 Berechtigungen
Berechtigungen


 Zitieren
Zitieren
Lesezeichen