








Hi Dirk,
es gibt neuigkeiten:
- ich habe einige bauteile "gesockelt" um flexibler beim beuteiletausch zu sein
- reflektoren an den IR dioden angebracht

und eine zweite platine "huckepack" , steckbar draufgesetzt mit einer zweiten blinkschaltung, die die IR bake ein und ausschaltet:
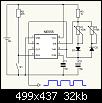
mit den beiden potis kann ich fast beliebige schaltintervalle einstellen...


allein durch die reflektoren und das "blinken" der IR-LEDs ist jetzt die reichweite bis auf ca. einen meter gestiegen...
Nächste woche werde ich andere vorwiderstände an den dioden testen und andere transistoren...

 Zitieren
Zitieren

Lesezeichen