




gebe mal die Suchbegriffe: pan tilt servo
bei der Google Bildersuche ein - alle drei Wörter auf einmal.
Ich denk, da hast du genug Links.




gebe mal die Suchbegriffe: pan tilt servo
bei der Google Bildersuche ein - alle drei Wörter auf einmal.
Ich denk, da hast du genug Links.
Hi Vohopri,
vielen Dank für den Tipp. Deine Lösung scheint ja machbar zu sein. Ich habe mal eine Skizze beigefügt. Sie zeigt 3-Konfigurationen des Arms. Zwischenpositionen sollten auch möglich sein.
Was haltet Ihr von Schrittmotoren für den Einsatz?
Meinen Berechnungen nach müsste am "Gelenk an der Wand" (GW) ein Haltemoment von 6000Ncm haben?!? Kann das stimmen?
Beim Gelenk am Monitor müssen 500Ncm ausreichen.
Das mittlere Gelenk bräuchte dann ca. 3000Ncm, oder?
Welche Motoren könnt ihr da empfehlen und was kosten die etwa? Und wo kann ich sie kaufen?
Vielen Dank schon einmal im Voraus!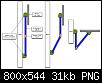

Hallo,
den dritten Fall würde ich weglassen. Der Grund ist, das Du nicht abschätzen kannst ob ein Bediener sich nacher noch draufsetzen möchte oder als Wickeltisch benutzt oder wie stark er das Pad baerbeitet. Deshalb gibst Du dem Bediener diese Möglichkeit am besten garnicht erst - jedenfalls solange es ein roboterarm ist dessen Haltemoment auf den Monitor ausgelegt ist. Wenn es sich unbedingt auch in diese position ausrichten muss, könnte ich mir vorstellen das sich sogar Leute draudstehlen wollen. Das muss ja nicht sein, right?
ich persönlich würde auch zur Pan and Tilt Lösung tendieren. Ein ganzer Arm scheit mir etwas oversized.
 Berechtigungen
Berechtigungen


 Zitieren
Zitieren
Lesezeichen