








Wo hatte ich denn aktuell überhaupt ein Problem der Bodenfreiheit angesprochen? Kannst Du dazu bitte kurz zitieren woher Du das hast.
Und schnelles laufen? - laufen irgendwann irgendwie ja, aber schnelles. Soweit ich meine Threads kenne habe ich schon bei der Planung des Designs diesen Aspekt "des schnellen laufens" berücksichtigt und somit nicht geplant.
Aber man ändert nicht in einer Phase der Programierung nochmals einen Aufbau der keiner Änderung bedarf.
Als langjähriger Hexabotbauer ist mir klar, dass ich das Design zu JEDER Zeit komplett Ändere, wenn es mir einen Vorteil bringt.
Vielleicht hast du meine Threads nicht genau in erinnerung, aber sowohl beim Phoenix, als auch bei meinem Vinculum habe ich die Konstruktion der Beine noch sehr, sehr oft verändert, obwohl der Hexa bereits komplett fertig war.
Wenn es um ein mechanisches Problem ginge, würd ich Dir recht geben. Aber da die Beine nicht bautechnisch mechanisch überladen sind ist auch keine Korrektur am Material nötig.
Soweit ich noch weiß hattest Du erhebliche Problem mit den von Dir geplanten Beinen in der Umsetzung.
Bei Detailverbesserung oder Erweiterung der Funktionalität behalte ich mir selbstverständlich vor betroffen Teile neu zu planen.
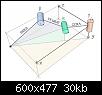
Ich habe hier übrigens irgendwo ein schönes Bild gefunden das alle relevanten Daten der IK des Beinse ab der Hüfte auch sehr gut darstellt:

 Zitieren
Zitieren

Lesezeichen