








Der Sensor müsste einen Finger problemlos detektieren können (vermutlich nicht auf 20cm, aber etwas näher), dafür ist der Sensor ja gebaut.
Klar, diese Messungen sind nicht unbedingt praxisnah... 18% Reflexionswert ist aber meiner Meinung nach relativ gut, üblicherweise hat man vermutlich höhere Reflexionswerte und damit ein besseres Ergebnis (z.B. helle Tapete oder Linoleumboden).
Ich werde die Sensoren (falls sie sich so verhalten wie ich mir das vorstelle) in die Füsse meines geplanten Bots einbauen, damit ich deren Distanz zum Boden jederzeit messen kann bzw. rechtzeitig reagieren, wenn ein Bein ins Leere tritt. Bei der Grösse des Sensors gibt das eine ziemlich kleine Sache
So, habe eine erste Version angefertigt:
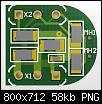

Das PCB hat 12.5 x 11 mm Masse, der Aussenradius ist 5mm. Sensor und (100nF) Stützkondensatoren sind auf der Unterseite, der Rest oben. Der Stecker entspricht nicht dem Roboternetz-Standard, das liegt aber daran, dass ich etwas bestimmtes damit plane (die Platine soll über die Löcher an den Rändern mit dem Bein verbunden werden, und zwar mit Nadel und "Faden" (Draht)
Lochabstand der beiden Stiftleisten ist 2.54mm, man kann also einfache Stiftleisten einlöten und mit passenden Steckern verbinden.
Design und Form werden vermutlich nochmal geändert, aber im Grunde werd ich das wohl so ähnlich produzieren lassen. Hat jemand Interesse daran und möchte auch welche? Grössere Stückzahlen drücken immer den Preis runter...
//Edit:
Design wird definitiv nochmals abgeändert. Die Anschlüsse passen mir so noch nicht. Das Ganze wird wohl noch minimal grösser werden, der Stecker durch eine SMD Stiftleiste ersetzt und die Löcher am Rand alle als nichtkontaktierte Bohrungen ausgelegt.

 Zitieren
Zitieren

Lesezeichen