




 Zitieren
ZitierenHi Inka,
da gabs mal ne nette Servo-Lib für bis zu acht Servos, hat Dirk für uns gemacht:
Liegt HIER
Da wird einfach ein 10poliger IO-Stecker mit 8 IOs genutzt (die anderen beiden Pins sind VDD und GND).
Grüße




gruß inka
Hi Inka,
da gabs mal ne nette Servo-Lib für bis zu acht Servos, hat Dirk für uns gemacht:
Liegt HIER
Da wird einfach ein 10poliger IO-Stecker mit 8 IOs genutzt (die anderen beiden Pins sind VDD und GND).
Grüße

Stepper finde ich gut, Motörchen zum basteln dafür finden sich in jedem FloppyLW, Festplatte oder Drucker. Eine richtige Stepperplatine wird das aber nicht ersetzen aber zum ausprobieren und erste Schritte sicher ne Idee.
Problematisch wirds warscheinlich bei den vielen verschiedenen Arten von Ansteuerungen für Stepper.
Die "8 Servos der M32" sind rein Softwarepwm getrieben und belegen die normalen IO Leitungen der M32.
Man kann die sicherlich auch auf das IO Board führen, Servostecker muss man ja nicht zwangsläufig nur für Servos nutzen.... Ich sehe die Dinger vor allem als Single IO port mit GND und +, und man kann sie einfach mit einer Steckerleiste abgreifen wenn man mehrere Ports braucht. Man verschwendet halt nur etwas Platz im Vergleich zu einem (10-pol)Wannenstecker wenn man so viele freie + und GND Pins hat. 8 io Leitungen mit Versorgung belegen 10 Lötaugen, als Servo-Stecker ausgeführt dann gleich 24. Elektrisch tut sich das mal garnix...
Allerdings denke ich, das die M32 Ports besser so angeschlossen würden, so das sie die anderen Funktionen des Boards auch steuern können. Also IRQ Eingänge usw.
Eigentlich brauchen wir mal eine Map, die auflistet welcher Port von welcher M auf welche Funktion des Boards geht.
Also sowas:
| m32 | m128 | m256 | board
|Porta1|Porta1|Portb1| LED1
usw..
Dann erkennt man - entgegen den Schaltplänen - auch einfach, welche Dinge von wo aus nutzbar sind...
Ich hab da schon längst den Durchblick verloren.
LG Rolf
Geändert von RolfD (20.11.2012 um 23:05 Uhr)
Sind Sie auch ambivalent?
Hi! Dirk hat das mal alles für uns gemacht
Ich habe momentan einen ADC-Stecker (10polig) drauf, einen IO-Stecker (10polig) und den dicken ADC-Stecker der M256.
Momentan sind davon belegt:
ADC_M256_14polig:
- SankeVision L und R
- Zwei beliebige Spannungsteiler
ADC 10polig:
- ADC_batterie
- Taster oder wahlweise NE555
IO 10polig:
Hier kann man stets wählen, ob man feste IOs nimmt, ob man den ULN2803 benutzt, oder ob man selbst etwas an dem IO anstöpselt
- Beeper (Pin 5, da hier von M256 PG5 oder PB4 liegen)
- Snake-Vision wird durch ULN2803 an Pin 4 Schaltbar
Natürlich fehlt hier noch das ein oder andere (Bumper, Sharps, CNY70) aber hier bin ich noch am probieren, wie man das sinnvoll machen kann, da alleine für die drei genannten 7 ADCs (2 sharps, 5 CNYs) und 3-4 IOs (CNY an/aus, 2 Bumper, Sharps an/aus) benötigt werden. Das ist ne ganze Menge... vor allem, wenn man alles noch wählbar halten möchte.
Geändert von fabqu (21.11.2012 um 12:39 Uhr) Grund: Falsche txt hochgeladen
@Dirk:
Stimmt mein GPS so???
Irgendwas passt da doch am Rx nicht, oder???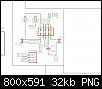

Hallo,
Nein das ist kein Übertrager.Zitat von RolfD

Ausser Transceiver und der Terminierung ist (für Hobby Anwender) nichts notwendig.
Ist für kostengünstige Sachen auch nicht sinnvoll da halt zusätzlicher Hardwareaufwand / Platz pro Knoten und benötigt
auch deutlich mehr Energie als z.B. I2C.
Für den I2C Bus gibts viel viel mehr schöne einfach zu verwendende standard Chips.
Gilt ähnlich für SPI und UART.
Halt stopp ich habe da von USB geredet und nicht von CAN. CAN nutzen ist deutlich einfacher - in den CAN Controllern wird das meiste in Hardware erledigt!
Und bitte nicht jedes Wort (5 Layer) das ich hier schreibe gleich auf die Goldwaage legen.
5 Layer ist halt die standard Aufteilung, das war nur Beispielhaft - wieviele es genau sind ändert nix an der Kernaussage das es unnützer Overhead ist
MfG,
SlyD
@Slyd
Dito....gleich auf die Goldwaage legen...
Aber bitte auch folgendes.. man kann ein I2C oder UART Treiber als 3-Zeiler schreiben. Geb ich dir recht.
Der RP6 ic2 Treiber sieht entsprechend übel aus und die UART Routinen sind auch nur halbherzig IRQ gesteuert.
Man kann aber sowas z.B. auch als Interrupt driven und mit FIFOs machen... deshalb hat man noch lange keinen unnützen Overhead ala 5 Layer.
Wir diskutieren hier aneinander vorbei, wenn es Dir immer nur um Minimalismus und 3-Zeiler geht, und du alles kritisierst was ich darüber hinaus anrege.
Ich kann auch 3-Zeiler schreiben aber darum gehts hier nicht!
Es ist weder software mäßig kompliziert, noch hardwaren mässig schwer, USB zu nutzen.
http://www.obdev.at/products/vusb/projects-de.html
Es ist dafür auch kein Linux oder wahnsins Overhead nötig - man kann ihn betreiben wenn man möchte aber das gilt auch für jedes andere Protokoll.
Lass uns das hier abschließen, es bringt nix wenn wir in einem Projekt Grundsatzdiskussionen führen, die bestenfalls in den FreeRTOS Thread gehören.
I2C als in-system-kommunikation und USB als Anbindung nach aussen /zum spielen wie ein steppertreiber widerspricht sich nicht.
LG Rolf
Geändert von RolfD (21.11.2012 um 17:28 Uhr)
Sind Sie auch ambivalent?
Es ist weder software mäßig kompliziert, noch hardwaren mässig schwer, USB zu nutzen.
http://www.obdev.at/products/vusb/projects-de.html
Eine Library ähnlicher Bauart habe ich doch oben selbst gepostet.
Das ist aber wie dort schon gesagt auch nur für HID (und ähnlich einfache Sachen) nutzbar.
Mit "man braucht Linux" meinte ich die Ansteuerung von den wirklich interessanten Geräte die es für USB gibt.
Ich stelle doch nur in Frage ob es den Aufwand rechtfertigt wenn es die gewünschten Funktionen auch für normale Schnittstellen wie UART/SPI gibt wo man sich den USB Overhead komplett erspart.wenn es Dir immer nur um Minimalismus und 3-Zeiler geht, und du alles kritisierst was ich darüber hinaus anrege.
Jup. Schluss für heute, jetzt erstmal AbendessenLass uns das hier abschließen
Bis dann,
SlyD
@SlyD und Rolf:
1. der USB-Host ist schon auf einem eigenen Board mit dabei, hat sich also erledigt, solange wir es dabei belassen
2. ein CAN passt momentan eher nicht drauf. Vielleicht versuche ichs am Wochenende noch mal, den irgendwo hinzuquetschen
3. damit wäre es mir sehr recht, wenn Diskussionen zum Bereich "Overhead", USB, Bus und dem ganzen PiPaPo aus diesem Thread draußen bleiben würden. Das füllt hier lauter Seiten, hilft aber nicht beim eigentlichen Thema. Ich denke mal, es gibt viele hier im Forum, die euer Thema genauso spannend finden wie ihr, daher könnten ihr doch nen Thread dazu eröffnen: "USB, CAN, I2C, UART - was kann was?" oder wie ihrs eben möchtet.
Danke euch.
@Dirk: Bitte obere Frage zum GPS beachten!

@Fabian:
Ich gehe mal davon aus, dass der 5-polige GPS-Modul-Stecker auf den Pins 1,3,5,7,9 von SV11 sitzt!? (Warum ist der doppelreihig?)
Wenn ja, dann wäre RX des GPS-Moduls an Pin 9, richtig?
Wenn ich das so richtig sehe, dann ist der Spannungsteiler richtig.
RX_OUT müßte dann auf der Platine mit TX des UART verbunden werden und TX deines Schaltplans mit RX des UART.
Gruß
Dirk
 Berechtigungen
Berechtigungen

Lesezeichen