-

-
Neuer Benutzer
Öfters hier
Schweißgerätesteuerung PWM Atemga 32
Hallo erstmal...
bevor ich bei euch mit meinem Projekt um Rat suche..zu mir und meinen Kenntnissen...
Bin Schweisser und habe ein paar Jahre auch Geräte selbst repariert und umgebaut. Also 230V und 400V sind mir eher gelegen als
mein jetziges Projekt. Bin sozusagen Elektronik Neuling.
Ich habe jetzt mal 2 Wochen gelesen und gelesen und komme nicht weiter
Habe diverse Schaltungen nachgebaut, aber Schaltung selbst konzipieren..Fehlanzeige.
Nun zur Sache und ich erläutere es ausführlich damit jeder weiß worum es geht: Wer Wig Schweissen kennt weiss das man den Schweissdraht per Hand zuführt.
Es gibt seit einigen Jahren separate Drahtvorschubgeräte am Markt bei denen der Schweissdraht direkt "an" den Brenner rangeführt wird. (Nein kein MIG MAG!!!)
Ich habe mir zum Ziel gesetzt sowas mal selbst zu bauen. Die Geräte kosten einfach gehalten ab 1500€. Lohnt sich nicht für mich...
Ich habe bei Youtube folgendes entdeckt...könnte auch meine Idee sein  ) http://www.youtube.com/watch?v=VqU0Vbnpvwk Hier mit einem PIC programmiert.
) http://www.youtube.com/watch?v=VqU0Vbnpvwk Hier mit einem PIC programmiert.
So soll es mal enden...
Alles läuft über Atmega32
Hardware sieht dann so aus. Drahtvorschubmotor mit 24V DC und max. 2A (Soll PWM gesteuert werden)
Brauch nicht Lastunabhängig sein...wäre Optional.
Funktionsweise: Drücke Brennertaster...Lichtbogen zündet und Draht läuft an. (wegen Vorwärmen muß aber ein Verzögerung rein, verstellbar von z.b. 0-10s)
Dann soll der Draht entweder (über Umschalter schaltbar) kontinuierlich laufen oder In Intervallen. Die Intervall / Pausenzeiten sollen auch jeweils verstellbar sein ca. 40-200 Pulsen pro Minute.
Bei Brenner loslassen muß der Draht für für einige ms zurückgezogen werden sonst klebt er an!
Dann wäre noch gut eine Umschaltung von 2 Takt auf 4 Takt ( 2 Takt = Brennertaster gedrückt halten während des Schweissens / 4 Takt = 1x Drücken /loslassen.. schweissen /1x Drücken /loslassen Schweissen beenden) (muß aber nicht)
Hier ein Beispiel http://www.weltec.de/download/WV44.pdf
Es soll alles über 10k Potis gesteuert werden Intervall/Pause, Pwm, Predelay & Drahtrückzug für ein paar ms.
Alles auf 4x16 LCD
Ich bin nun soweit das ich erstmal die Motorsteuerung bauen möchte.
Da ich Anfänger bin und ständig lese, sehe ich wahrscheinlich den Wald vor lauter Bäumen nicht.
Schaltung 1. Vorschlag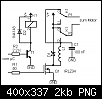
Sehr einfach gehalten. Man hat mir dann zum L298 geraten wegen den zusammengefassten Ausgängen wegen erhöhter Leistung. Aber die mir dazu geraten haben werfen mir nur Brocken zu mit den ich nichts anfangen kann. Ich will begreifen wie es funktioniert!!!
L298 Später!!! Erst soll mal alles laufen.
Grob gesagt soll´s so sein: Motor läuft an, Motor muß abruppt abgebremst werden und dann kurz ein Drehrichtungswechsel für ein paar ms.
Ich möchte das mal mit dem Relais probieren. Denn die Bauteile sind alle da
Meine Frage: wo muß, wie muß, was muß und wie wird´s angesteuert wenn ich in die erste Schaltung mit Relais ein P-Mosfet o. PNP Transistor zur Bremse einsetzen möchte? Ich möchte mal so mal so probieren. L298 ist natürlich verlockend
Vorhanden: Pollin Evaluationsboard, Schaltnetzteil 24V 5A, Schaltregler (Step Down mit LM2576 5.0). Für die DC Steuerung habe ich vorsichtshalber 3 Mosfet gekauft
Potis...u.s.w
Grüße Brutzel Basti
Geändert von Brutzel_Basti (29.03.2012 um 20:49 Uhr)
-
Neuer Benutzer
Öfters hier
Hallo,
wenn Du absoluter Elektronik-Neuling bist, würde ich auch eine sehr simple aber effektive Anfangslösung empfehlen.
Such mal nach "Arduino" & "Motor-Shield". Damit kannst Du mit relativ flacher Lernkurve Dein Projekt realisieren. Wenn Du dazu mehr Hilfe brauchst, helfe ich Dir gerne (als WIG-Anfänger  ).
).
Ansonsten google doch mal nach "H-Brücke" oder "H-Bridge", falls Du Dir Hintergründe zur Motoransteuerung aneignen möchtest. Der L298 ist auf jeden Fall erstmal eine gute Wahl (die Motoren werden wohl für die relativ dünnen Schweißdrähte nicht allzuviel Kraft brauchen). Auf Ebay gibt es da auch günstige Boards (so ab 5 Euro). Suche mal nach "L298" & "board" und dann Suche auf "weltweit" einstellen.
Mir ist der Sinn Deines Projektes aber noch nicht so ganz klar. Soll das WIG mit automatischem Vorschub & Zuführung werden? Also Schweißen mit (Wolfram-)Elektrode und automatischer Zuführung des Schweißdrahtes anstelle des "reinen" MIG? Oder wozu das ganze? Und wo wäre der Vorteil?
Liebe Grüße,
Markus
-
Neuer Benutzer
Öfters hier
Hi,
genau, ähnlich wie MIG wird der Schweißdraht außen an den Brenner rangeführt. Mir gehts hier speziell um Rohre denn da ich das "rollen oder schwengeln" beherrsche gehts da zügig voran.
Bsp: Rohr  . Die Wurzel hat ca. 1 Min. gedauert!
. Die Wurzel hat ca. 1 Min. gedauert!
Vorschubgeräte werden bei WIG eingesetzt um noch schneller schweißen zu können. Kaltdrahtsystem nennt sich das. So wie ich das vorhabe kostet das im Handel 3000-4000€
-
Erfahrener Benutzer
Roboter-Spezialist
Hallo..
1. also du legst an die linke Seite von R2 5V an damit schaltet das Relais K1 für die Motorrichtungsumkehr Kannst du ja erst mal so verdrahten später benutzt du einen Ausgang des Pollinboard
2. legst du an die linke Seite von R1 5V an bekommt der Motor Spannung wichtig ist das du zum Abschalten des MOSFET R1 wieder auf Masse bringen musst (damit sich das Gate im FET entläd) -- das kannst du später auch mit nem Ausgang des Boardes machen
3. wenn du an R1 eine PWM anlegst (schnelles an Ausschalten mit definiertem Verhältniss zwischen on und off time) kannst du den Motor in seiner Geschwindigkeit steuern
4. Die Potis kommen auf die Analogen Eingänge des Atmega und werden von diesem eingelesn und ja nach software verarbeitet
5. Wie du das programmiertechnisch umzusetzten hast liegtr an deiner gwewählten programmiersprache (Der Atmel muss programmiert werden)
PS : zum Testen kannst du D1 und C1 weglssen und L1 durch eine direkte Verbindung ersetzen (Ich hab schon einige H-Bücken entworfen die laufen alle ohne LC Glieder an dieser Stelle)
Geändert von molleonair (30.03.2012 um 21:31 Uhr)
-
Neuer Benutzer
Öfters hier
Also, habe mir den L298 besorgt + aller "Nebenteile". Ich werde ein H Bücke realisieren.Ich möchte allerdings auch die oben genannte Schaltung probieren, dafür sind auch alle Teile da. Mir ist nur nicht klar wie ich ein P Mosfet parallel klemme und ansteuere um den motor zu bremsen...genauso bin ich zwecks Gate entladen nicht dahinter gestiegen (R1 gegen Masse) Ps: Da ich das begreifen will möchte ich mehrere Versionen testen. Auf die 10€ wenn was abraucht kommt es auch nicht an Und da ich nahe Berlin wohne, dauert es nur 30min bis zu SEGOR oder Apotheken Conrad
gruß Brutzel Basti
-
Erfahrener Benutzer
Roboter-Spezialist
Hi basti ...
warum willst du den Motor mit nem P-FET bremsen ?
Du musst schon die schaltungen auseinander halten.
Bremsen tut man den Motor in dem man den Strom durch die Spule möglichst schnell abbaut.Dies geht mit ner H-Brücke am besten indem man den Strom über die beiden unteren FETs abbaut oder die krasse Methode die Spannung zum Motor kurz umpolen.
Das Gate des FETS bestimmt ob dieser leitet oder nicht ..... wird das Gate auf eine Spannung aufgeladen zB bei deinem auf 5V leitet der FET.Will man den FET wieder sperren so muss man das Gate entladen und dass macht man indem man das Gate auf Source Potential bringt (in deinem Fall Masse)
-
Neuer Benutzer
Öfters hier
-
Erfahrener Benutzer
Begeisterter Techniker
Also zum Thema GND: Wenn du definitiv zwei verschiedene Spannungen brauchst, wozu ich dringend rate, dann solltest du einfach die Massen der beiden Spannungsversorgungen verbinden. Das ist notwendig damit das alles ordentlich funktioniert. Nicht notwendig ist das ganze nur wenn du den Motor vollkommen galvanisch getrennt ansteuert z.b. über Relais oder Optokoppler.
Was mir noch direkt aufgefallen ist bei diesem Projekt ist, dass du hier mit einem Schweißgerät arbeitest, dass mit sicherheit sehr hohe Ströme schaltet und noch dazu einen Dicken Trafo drin haben wird. Das kann zu störungen auf deiner Platine führen (controller reset etc.), da bei so hohen Strömen immer auch die Versorgungsspannung beeinflusst wird und somit auch dein Controller. Mal abgesehen davon kann das entstehende Magnetfeld ebenfalls Spannungen auf deiner Platine induzieren wenn diese nah genug am Schweißtrafo montiert ist.
Also gilt: Viele Abblock-Kondensatoren verwenden, Spannung gut sieben durch entsprechende Filter, Platine nach möglichkeit Schirmen.
Gefällt mir übrigens sehr gut dein Projekt 
-
Erfahrener Benutzer
Roboter-Spezialist
ich kenn das Pollin Board nicht aber wahrscheinlich werden die 12V Eingangsspannung nur auf 5V runtergeregelt mit nem 7805 oder so. Das siehst du ja im Schaltplan des Board.Wenn dem so ist würde ich die 5V ausm LM2576 auf das Pollinbord geben
(Das hat bestimmt auch nen Anschluss für 5V Spannungsversorgung)
poste doch mal die Schaltung die du jetzt per Luftverdrahtung vorhast.
-
Neuer Benutzer
Öfters hier
Also Verdrahtung geht alles, habe 5V am Pollin Boad direkt geklemmt.
Als Treiber verwende ich den L298N in Vollbrückenschaltung
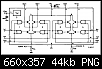
Mir ist heute leider der 2. L298 abgeraucht.
In1 liegt an Atmega32 PD5
En an PD4. Mit IN2 habe ich es nicht erst probiert!
Statt Motor habe ich erstmal geschaut ob er dann die 24V durchschaltet. Out1&2 Multimeter ran. 24V und nach 5 sek Knall
Bin ich zu doof für
Hier Konfig: Poti 10k Schleifer an PA1(Atmega32) Rest an 5V, GND
LM298 In1/4 parallel , In2/3 parallel , Enable Parallel. In1/4 an PD5 und Enable an PD4
Motorspannung 24V DC
Versorgung: 24VDC Schaltnetzteil: LM2576 5.0 Spanungsregler für Vss u.s.w.
Ps: 4x BYV27-200 an den Ausgängen
gleichstromtreiber-L298.GIF
Mein Beispielcode
Config Adc = Single , Prescaler = Auto , Reverence = Avcc
Config Timer2 = Pwm , Pwm = 8 , Compare A Pwm = Clear Up , Prescale = 1
'Konfiguration der Ports
Config Porta.1 = Input
Config Portd.5 = Output
'================================================= =====
'Deklarationen
'================================================= =====
Dim Analogwert As Word
Dim Pwmwert As Byte
'================================================= =====
'Initialisierungen
'================================================= =====
'Anschaltung der Analogwert-Verarbeitung
Start Adc
Portd.4 = 1
'Start des PWM-Timers
Enable Timer2
Timer2 = 0
Start Timer2
'================================================= =====
'Hauptprogramm-Schleife
'================================================= =====
Do
'Analogwert vom Poti einlesen, umrechnen und formieren
Analogwert = Getadc(1)
Analogwert = Analogwert / 4
If Analogwert > 255 Then Analogwert = 255
'Erzeugung des PWM-Signals
If Portd.5 = 0 Then
Ocr2 = Analogwert
Else
Ocr2 = 0
End If
Loop
 Berechtigungen
Berechtigungen
- Neue Themen erstellen: Nein
- Themen beantworten: Nein
- Anhänge hochladen: Nein
- Beiträge bearbeiten: Nein
-
Foren-Regeln







 Zitieren
Zitieren
Lesezeichen