




 Zitieren
ZitierenHallo!
Ich kenne das Teil selber nicht, aber laut Foto fehlt angeblich mindestens ein Rad/Gleiter. Sonst finde ich es für Anfang sehr gut.

 Werbung
Werbung


Hallo Kenner des Fachs !
Bislang habe ich mich hier nur als "Lesender" umherbewegt, denn durch mein neues Hobby "Atmel-Chips" bin ich auf dieses Forum gestossen. Ich konnte schon viel hier lernen, erfahren. Dank den Machern des Forums und denen die hier bereitwillig und gut helfen !
Nun da das Winterhalbjahr ins Haus steht, habe ich mich doch entschlossen auch mal praktisch bei den Robots einzusteigen. Es gibt ja einige Modelle im Handel.
Asuro zBsp, wäre voll ausreichend für mich, aber irgendwie möchte ich doch was "Eigenes" machen. Nun geht mir aber das Mechanische wegen kranker Gelenke(Finger usw.) schlecht von der Hand.
Auf meiner Suche habe ich bei Reichelt einen Bausatz als Grundgestell mit 2 Motoren, 2 Rädern usw. zu günstigen knappen 14 gesehen. Kennt wer das Teil und ist es einem Anfänger zu empfehlen ? (Bst.Nr ARX-CH09)
Es soll ja auch kein "SensationsRoboter" werden, ich möchte da nur mal eigenen Ideen freien Lauf lassen und diese programmtechnisch mit dem Ropbbi umsetzen...
Gruss und Dank
Gerhard

Hallo!
Ich kenne das Teil selber nicht, aber laut Foto fehlt angeblich mindestens ein Rad/Gleiter. Sonst finde ich es für Anfang sehr gut.
MfG (Mit feinem Grübeln) Wir unterstützen dich bei deinen Projekten, aber wir entwickeln sie nicht für dich. (radbruch) "Irgendwas" geht "irgendwie" immer...(Rabenauge) Machs - und berichte.(oberallgeier) Man weißt wie, aber nie warum. Gut zu wissen, was man nicht weiß. Zuerst messen, danach fragen. Was heute geht, wurde gestern gebastelt. http://www.youtube.com/watch?v=qOAnVO3y2u8 Danke!
Danke für schnelle Antwort !
In der Beschreibung steht mit Reifen und Kugelrolle, das hatte ich als incl. Gleiter verstanden mit meinem Neulingswissen
Gerhard
Das ist richtig (ich habe die Beschreibung nicht gelesen) und es soll dann volständig und fahrbereit sein.
MfG (Mit feinem Grübeln) Wir unterstützen dich bei deinen Projekten, aber wir entwickeln sie nicht für dich. (radbruch) "Irgendwas" geht "irgendwie" immer...(Rabenauge) Machs - und berichte.(oberallgeier) Man weißt wie, aber nie warum. Gut zu wissen, was man nicht weiß. Zuerst messen, danach fragen. Was heute geht, wurde gestern gebastelt. http://www.youtube.com/watch?v=qOAnVO3y2u8 Danke!
Also dann hast Du mir zur Kaufentscheidung geholfen, ich meine bei dem Preis kann ich nichts falsch machen. Es soll erst mal mehr zum Üben sein , als das ich damit "Preise gewinnen" möchte
Gerhard
Wenn du, wie ich immer, den Kaufpreis + Versandkosten als gröstmöglichen Verlust einkalkulierst, dann kannst du sicher unbeschränkt damit experimentieren, also vieeel Spass und Erfolg damit.
MfG (Mit feinem Grübeln) Wir unterstützen dich bei deinen Projekten, aber wir entwickeln sie nicht für dich. (radbruch) "Irgendwas" geht "irgendwie" immer...(Rabenauge) Machs - und berichte.(oberallgeier) Man weißt wie, aber nie warum. Gut zu wissen, was man nicht weiß. Zuerst messen, danach fragen. Was heute geht, wurde gestern gebastelt. http://www.youtube.com/watch?v=qOAnVO3y2u8 Danke!
So nun habe ich mir einen solchen Bausatz bestellt, Grundplatte mit Antrieb, werde nun als nächsten schauen müssen wie ich eine Powerstufe für die beiden Motoren zusammenlöte, erst mal Schaltung ausdenken. Ich denke aber das ich hier genug Informationen dazu finde. Gibt es eigendlich "Bastelbücher" für Robots ??
kann wer welches empfehlen ??
Gerhard
Ist grad ein paar Tage her das ich DIESE Platine hier vorgestellt hab - sollte für die winzigen Motörchen mehr als genug Power haben.
Hier noch mal der Schaltplan -
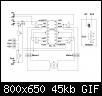
Statt der 12V natürlich 3V an Pin8.
+5V (9V Block mit nachgeschaltetem 7805) oder Gnd an P1 verändert die Drehrichtung von Motor2, +5V an P4 schaltet den Motor an (evt. PWM?)
Wenn es nicht der L293 sein soll dann nach "Halbbrücke" schauen.
Geändert von dussel07 (11.10.2011 um 20:45 Uhr)
Hallo Dussel, ja ich habe das schon gesehen, bin ja schliesslich hier fast täglich am Lesen und Lernen. Ich habe vor die kleinen Motoren meines Robby-1 mit einer IC Schaltung oder einer FET-Brücke anzusteuern. Habe auch schon im RN-Shop etwas gefunden , falls ich an keine Lpl zum Selbstbau herrankomme (Leiterplattenherstellung und SMD Technik fällt leider gesundheitlich bei mir aus)
Den Bausatz für den "Robby" habe ich bekommen, wie gesagt nur der Antrieb, Grundplatte und Batteriekasten..für meine ersten Experimente wird es reichen.
Was ich noch nicht begriffen habe, trotz SuFu und hunderten Antworten(viele auch gelesen vollständig), ist der Aufbau eines Linienfolgers, ich meine die Anbringung der Sensoren, von der Auswertung per µC mal abgesehen. Wenn ich es richtig verstanden haben soll, ist wohl vorne in der Mitte eine IR-Diode die Licht nach unten sended, Links und Rechts davon sind dann wohl die Lichtempfänger (Ph-Diode, Ph-Trans...?)?
Listings zur Auswertung habe ich haufenweise gefunden , aber eben keine Skitze mal wie sowas an Sensoren wo und wie montiert wird. Da wäre ich über eine Info schon gerne hocherfreut, muss ja kein Bauplan gleich sein..
Hat vieleicht schonmal wer die Ultraschall Sensoren aus dem KFZ bereich verbaut, kann ich diese als Abstandswarner hier auch verwenden ?
Wieder einige Fragen, aber ich habe ja nirgends so richtig was zu Antwort gefunden, gut alles habe ich wohl noch nicht studiert was das Web an Antworten so bietet, aber einen kompletten Nachmittag habe ich doch schon mit Recherchen verbraucht.
Meine Roby-1 Entwicklung und Bau werde ich auf meiner Roboterwebseite dokumentieren, die Url gebe ich noch bekannt, bzw kommt ins Profil.
Gruss und Dank
Gerhard
Hallo Gerhard!
Mit den Sensoren für Linienfolger muss man leider selber experimentieren um optimale Anordnung zu finden. Der Searcher hat schon damit erfolgreich gespielt (TT als Linienfolger o.ä.) und vielleicht findet man ein Foto davon. Ich kann mir nur erinnern, das sie schräg zum Boden vorne waren. Auf die schnelle habe ich nur das gefunden: https://www.roboternetz.de/community...l=1#post478095 .
Für die ultraschall Sensoren für mein geplanntes SAA ("solar artificial animal") interesiere ich mich selber, aber bei Pollin habe ich kein Schaltplan gefunden und bei mir wäre Versorgungspannung um 2.5 V notwendig. Wenn ich Schaltplan hätte, könnte ich es hoffentlich anpassen: http://www.pollin.de/shop/dt/NTg5OTE...r_Bausatz.html . Vielleicht würde ich die 7,95 € riskieren.
Geändert von PICture (16.10.2011 um 16:29 Uhr)
MfG (Mit feinem Grübeln) Wir unterstützen dich bei deinen Projekten, aber wir entwickeln sie nicht für dich. (radbruch) "Irgendwas" geht "irgendwie" immer...(Rabenauge) Machs - und berichte.(oberallgeier) Man weißt wie, aber nie warum. Gut zu wissen, was man nicht weiß. Zuerst messen, danach fragen. Was heute geht, wurde gestern gebastelt. http://www.youtube.com/watch?v=qOAnVO3y2u8 Danke!
 Berechtigungen
Berechtigungen


Lesezeichen