
 Werbung
Werbung


Die versorgung des mini- Boards über eine Led?
Also wenn ich mich nicht irre dann kommen doch max. 20mA beim Board an.
Warum die Led? Wenn sie den status (an / aus) anzeigen soll, dann könnte man sie doch Paralell dazu schalten und Vorwiderstand nicht vergessen oder aber auch einen Pin des Controllers dazu verwenden, dann kann man sie auch gleich zum Debuggen nutzen (an kritischen Stellen im Programm an oder aus schalten, um zu sehen, ob das Programm diese Stelle passiert.
Aber den Strom für zwei Motoren und das Controllerboard durch eine Led Hindurch, ich weiß nicht...
Die Diode in der Versorgung muss weg, so dicht wie möglich einen 100nF Kondensator zwischen VIN und GND, Reset über einen 10k Widerstand an VIN.Zitat von Extisher

Gruß Richard
Habe in der letzten Zeit nicht so viel getan.
Jetzt will ich wieder weitermachen, mit meinem kleinen Projekt. (und diesmal auch dranbleiben)
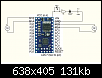
Schaltplan nochmal nach Angaben erstellt. Hoffe ist diesmal richtig.
Die Luftschraube werde ich nochmal auswechseln. Die jetzige ist mit 200 mm Durchmesser zu groß.
Nein so kann das nicht funktionieren, der 10K hängt ja in der versorgungsspannung drin und der 100n kondensatsor auch, der muss paralell dazu. Auch die led wird so nicht leuchten, die ist ja überbrückt.
Ich habe mal versucht, es so ins paint reinzuzeichnen wie es glaube ich geplant gewesen wäre. Ich hoffe das hilft.
Mfg Thegon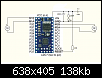

Hallo

(Ausschnitt aus http://robotikhardware.de/download/B...oller_B328.pdf S. 9)
Sollte man die Akkus nicht besser an Vcc anschliessen?
Gruß
mic

Atmels products are not intended, authorized, or warranted for use
as components in applications intended to support or sustain life!
Danke für die Informationen.
Wo kann ich jetzt noch den Schalter bzw. Taster anbringen?
Zur Zeit beschäftigen mich noch das Problem mit einem dritten Motor für die Luftschraube. / Und da wäre noch das mit der Fixierung der Motoren und der Räder. (die sind wackelig beim drehen) /
vielleicht bekleben? (das Motorritzel in das Rad kleben)
Habe nochmal meine Skizze mit der Oberseite des Roboters überarbeitet. (wenn ich es so nennen kann) / ich verwende also statt 4 Motoren, 3 Motoren.

Auch habe ich das Gestell einfach mal so zusammen geschraubt.
Er ähnelt dem Pro - Bot 128. / nur die Halterung habe ich verstärkt.



Geändert von Extisher (02.01.2012 um 12:35 Uhr)
Hallo
Ich bin mir nicht sicher, ob meine Infos richtig sind. Möglicherweise stimmt der Schaltplan nicht. Hier ein Blick auf den Motortreiber:

Wo sind denn die Anschlüsse VM1-3 (Pin 13, 14 und 24 für die direkte Motorversorgung ohne Umweg über den Spannungsregler)? Warum wird PWMA(23) und PWMB(15) mit Vcc verbunden und nicht, wie ich erwartet hätte, mit PWM1A und PWM1B des ATMega? Das erinniert mich stark an den Probot mit seinem PWM 50:50 für Stillstand.
Und warum ist im Plan ein Mega168 eingezeichnet? Seltsam.
Gruß
mic
Aha, auf Seite 8 steht dazu:
Krass!Der Motor 1 wird kontrolliert über die PWM fähigen Timerausgänge PD5 (OC0B) und PD6
(OC0A). Durch entsprechende Timerprogrammierung (siehe auch Beispielprogramm) kann somit
die Geschwindigkeit des Motors beliebig programmiert werden.
Der Motor 2 wird kontrolliert über die PWM fähigen Timerausgänge PD3 (OC2B) und PB3
(OC2A). Durch entsprechende Timerprogrammierung (siehe auch Beispielprogramm) kann somit
die Geschwindigkeit des Motors beliebig programmiert werden.
Atmels products are not intended, authorized, or warranted for use
as components in applications intended to support or sustain life!
Hängt davon ab, was man damit schalten will.
Ein schalter, der die Versorgungsspannung und somit den Roboter abschalten soll könnte man einfach in Serie mit einem Pol des Akkus (+ pol) schalten, dann muss man nicht immer den akku abstecken.
Die Taster, die (womöglich) eine berührung mit einem Gegenstand aufzeigen sollen:
Ein Pol nach Masse, den anderen auf einen Pin des Controllers, dann noch Pullupwiderstand (z.B. 10k) von Controllerpin nach 5V.
Den entsprechenden pin dann natürlich auf eingang konfigurieren, dann kann man den Status auslesen.
Alternativ könnte man als eingang auch einen Interrupt pin (auf dem Board PD.2) nutzen, das Hauptprogramm wird dann unterbrochen und eine eigene Routine ausgeführt, man kann dort hineinschreiben, was passieren soll, wenn der Taster gedrückt wird.
Mfg Thegon
 Berechtigungen
Berechtigungen






 Zitieren
Zitieren
Lesezeichen