




Respeckt, gut gerüstet.Zitat von Extisher

Wichtig währen noch einige 100nF Kondies , die gehöhren an JEDES IC so nahe wie möglich an dessen Spannungsversorgung. Davon kann man nie genug haben, bei der Größe sind die schnell "wech".
Gruß Richard



Respeckt, gut gerüstet.
Gruß Richard
Gut Gut
Morgen werde ich denk ich mal bestellen /
Das hilft mir jetzt alles weiter. Immerhin stand bei den Vorkenntnissen die man für einen Elektroniker haben sollte
Mathematik und Physik. Und bei was lerne ich mehr als wenn ich einen eigenen Roboter baue mit Schaltungen.
Geändert von Extisher (10.09.2011 um 18:42 Uhr)
Ich habe mir es nochmal durchgelesen. Was die Programmer betrifft.
Das bestellen hat sich etwas hingezogen.
http://www.shop.robotikhardware.de/s...roducts_id=241
Dieser USB Programmer sollte es auch tun.
Es gibt zwar noch andere aber dieser ist ausreichend.
So ich habe jetzt die nötigen Teile
Ich habe festgestellt das die Räder an den Motoren ganz schön wackelig sind:
Wie kann ich sie besser fixieren?
Ich habe mir auch gleich ein paar Stiftleisten besorgt.
Leider passt auch die Luftschraube nicht auf den Motor. Was könnte ich da machen?
Ein Stück weitergekommen.
Ich etwas rumüberlegt wie ich es am besten mit dem Schaltplan machen könnte.
Ist aber nicht korrekt.
Zum jetzigen Stand sieht es so aus:
Ich bin mir nicht sicher ob die Schaltung richtig ist aber ist schon mal ein guter Anfang.

Die versorgung des mini- Boards über eine Led?
Also wenn ich mich nicht irre dann kommen doch max. 20mA beim Board an.
Warum die Led? Wenn sie den status (an / aus) anzeigen soll, dann könnte man sie doch Paralell dazu schalten und Vorwiderstand nicht vergessen oder aber auch einen Pin des Controllers dazu verwenden, dann kann man sie auch gleich zum Debuggen nutzen (an kritischen Stellen im Programm an oder aus schalten, um zu sehen, ob das Programm diese Stelle passiert.
Aber den Strom für zwei Motoren und das Controllerboard durch eine Led Hindurch, ich weiß nicht...
Die Diode in der Versorgung muss weg, so dicht wie möglich einen 100nF Kondensator zwischen VIN und GND, Reset über einen 10k Widerstand an VIN.
Gruß Richard
Habe in der letzten Zeit nicht so viel getan.
Jetzt will ich wieder weitermachen, mit meinem kleinen Projekt. (und diesmal auch dranbleiben)
Schaltplan nochmal nach Angaben erstellt. Hoffe ist diesmal richtig.
Die Luftschraube werde ich nochmal auswechseln. Die jetzige ist mit 200 mm Durchmesser zu groß.
Nein so kann das nicht funktionieren, der 10K hängt ja in der versorgungsspannung drin und der 100n kondensatsor auch, der muss paralell dazu. Auch die led wird so nicht leuchten, die ist ja überbrückt.
Ich habe mal versucht, es so ins paint reinzuzeichnen wie es glaube ich geplant gewesen wäre. Ich hoffe das hilft.
Mfg Thegon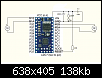
 Berechtigungen
Berechtigungen

 Zitieren
Zitieren
Lesezeichen