





 Zitieren
ZitierenWo ist das Problem mit Alu? Ich versuche alles daraus zu fertigen, so viel zu CFK/GFK fehlt da auch nicht und es ist viel gesünder für Mensch und Maschine.
So habe ich mir das vorgestellt:
Externes Bild anzeigen

 Werbung
Werbung


@MisterMou, eigentlich will ich da kein Alu verbauen sondern CFK und ich versteh nicht ganz was du mit "abkanten" meinst bzw. wie das später aussehen soll, da fehlt mir gerade das Bild dazu.
@HeXPloreR: Der Grundgedanke dahinter war es so wenig Maße wie möglich in den Beinen zu haben bzw. so nah wie möglich am Körper. Der Grund ist sehr einfach, je mehr Masse ich im Oberschenkel und Fuss verbaue, desto mehr Massenträgheit muss ich bewegen. Allerdings gebe ich dir recht, dass ich mit der Lösung selbst noch nicht so ganz glücklich bin. Eben wegen dieser braunen Klötze. Wenn ich den Servo allerdings im Unterschenkel verbaue, dann muss ich auch irgendwie die Anbindung an den Hüftservo realisieren, da ist mir ehrlich gesagt nichts eingefallen. Ich hatte mal ein Konzept wo die beiden Servos gestapelt werden, nur dann kann ich den Grundkörper nicht mehr nutzen, da die Beine dann zu schnell an diesem anstoßen. Da ihr Beide bedenken habt bzgl. "Verdrehen des Oberschenkels" muss ich hier wohl doch noch eine Distanzhülse oder sowas einplanen. Das Problem hatte ich schon bei meinem Phoenix², dass die Füße sich zu viel bewegen aufgrund der Mechanik.
Noch habe ich keine Teile bestellt oder gekauft, daher kann ich alles ändern, vor für den Verbindungsteil Oberschenkel Hüfte würde ich gerne noch eine bessere Lösung finden.
Wo ist das Problem mit Alu? Ich versuche alles daraus zu fertigen, so viel zu CFK/GFK fehlt da auch nicht und es ist viel gesünder für Mensch und Maschine.
So habe ich mir das vorgestellt:
Externes Bild anzeigen
Ah ok, das meinst du. Das hatte ich auch schon überlegt und als Königsweg angesehen, doch leider habe ich keine Möglichkeit gesehen dieses Profil kostengünstig fertigen zu lassen, vor allen so genau, dass ich am Ende alles wieder richtig zusammen bauen kann. Auch wenn ich bereit bin einiges für neue Beine zu investieren, so gibt es trotzdem irgendwo auch eine Grenze.
Besteht bei deinem Vorschlag nicht auch die Gefahr, dass sich der Oberschenkel verwindet? Bisher wurde das bei der jetzigen Konstruktion am meisten bemängelt und ich würde die neuen Beine gerne sehr verwindungssteif ausprägen. Die Füße selbst sind in dem Punkt schon sehr gut und bei der Schulter sehe ich nun auch kein großes Problem, bleibt also nur der Oberschenkel und die Anbindung an die Schulter.
Vorteil bei Alu wäre eben, dass ich viel mit Ausschnitten arbeiten könnte, wobei CFK/GFK natürlich viel leichter ist.

Tausche es um, wie bei Deinem alten Entwurf, mit den Haltern am Hüftservo.Zitat von HannoHupmann

Da hast aber recht mit der Massenträgheit, allerdings hast Du jetzt einen längeres Bein.
Wenn Du tauschst hast Du zwar wieder mehr bewegte Masse, aber kannst näher an den Hüftservo gehen mit dem Gelenk vom Oberschenkelservo, oder? Und das Bein kann etwa 20-30mm kürzer werden. Oder kommt dabei nicht ungefähr soviel an mm rum?
Geändert von HeXPloreR (11.03.2013 um 11:41 Uhr)
Der Abstand wischen Fussgelenk und Schulterservo ist genau gleich geblieben, hier habe ich nichts verändert, sieht nur optisch länger aus.
Ich bin mir nicht ganz sicher ob ich deine Idee schon richtig verstehe. Du willst Schulter-Oberschenkel Servo von der Position her tauschen? D.h. dass er im Oberschenkel verbaut ist, dann habe ich aber das Problem, wie ich diesen an die Hüfte anbinde mit den entsprechenden Lagern. Von der Breite wird sich dadurch nichts verändern und von der Gesamtlänge des Beines eigentlich auch nicht - soweit ich das jetzt verstehe. Die Servoachse möchte ich nämlich schon als Gelenkachse verwenden - ansonsten muss ich wieder mit Zahnriemen o.ä. arbeiten.
....Huch, ich meinte natürlich den Oberschenkelservo in den Oberschenkel einbauen....
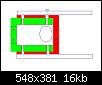
Ja, naja ich dachte so wie Du es schon hattest: Ich habe mir mal erlaubt eine Bild von Seite 13 etwas umzustricken....natürlich nur mit Paint

Kurze beschreibung: Der Oberschenkelservo liegt jetzt mit dem Abstand vor dem Hüftservo den er braucht um die gewünschte Bewegungsfreiheit zu behalten. Die Aluschienen die seitlich am Hüftservo angebracht sind werden "aufgedoppelt" damit sie auf der (auf dem Foto) sichbaren Seite entwerder das Gegenlager mit dem Servoboden bilden, oder auf der anderen Seite. Dementsprechend wird die Servohorn auf der gegenüber liegenden Seite auch an so eine Aluschiene befestigt. Damit hat man den Oberschenkelservo eingefasst, nur der Hüftservo ist dadurch etwas breiter wegen der Aufnahemkonstruktion für den Hüftservo geworden.
Im Grunde sieht der Aufbau dem Teil mit dem Fußservo auch sehr ähnlich. Nur das der Oberschenkelservo ja etwas Höher ist und daher dort eine stabile Verbindung geschaffen werden müsste.

Geändert von HeXPloreR (11.03.2013 um 16:49 Uhr)
Verstanden, zumindest weitesgehends.
Die Idee ist gut, auch wenn mir das Gegenlager am Servoboden nicht gefällt, hier hätte ich dann doch gerne eine andere Lösung. Falls ich aber wirklich auf Frästeile gehe wäre es vermutlich so einfacher. Ich muss nochmal ein wenig darum im CAD rumspielen vielleicht kommt mir noch eine andere Lösung.
he he, die Idee ist ja eigentlich Deine Eigene
Das Gegenlager überlasse ich Dir gerne. Ich würde einfach das nehmen was Du da in PVC gezeigt hast. Also nicht so direkt am Servoboden
Naja Frästeile hattest Du ja jetzt auch.
Ich denke man könnte sämtliche Teile sogar selbst im Schraubstock per Hand herstellen, wenn man mit den Toleranzen daduch klarkommt. Da wird dann schon mal ein Teil was man eigentlich 6x (gleich) hat, jedesmal ein Unikat
Blau und grün aus Alu, das braune aus PVC - ohne großartige Kanten und Absätze.
Zwei einfache U-Blöcke. Über den Servo schieben. Mit dem blauen Aluhalter verschrauben.
Geändert von HeXPloreR (11.03.2013 um 19:21 Uhr)
HeXPloreR mit der Idee bin ich gestern ein wenig weiter gegangen im CAD und beim Oberschenkel und insbesondere bei der Lagerung des Servos ist mir nun schon eine Lösung gekommen mit der ich gut leben kann. Für die Hüfte habe ich auch schon eine Idee sie ist ähnlich zu deiner, aber ich werde den Servo um 90° drehen. denn er ist ungefähr so lang wie der andere Servo breit ist. Daraus ergibt sich eine gute Lösung, ich schau, dass ich heute Abend mal ein paar Bilder zeigen kann.
Das mit dem Fräsen und Fertigen generell ist so eine Sache, ich fertige eigentlich fast nicht mehr selber, dafür fehlt mir die Zeit und auch die technischen Möglichkeiten. In der Arbeit gibt es ein Bandsäge, eine Standbohrmaschine und eine Schleifband das ich nutzen kann.
2D Teile lasse ich Laserschneiden, was recht kostengünstig ist
3D Frästeile - hab ich bisher vermieden, da ich keinen Kontakt zu einem CNC Fräser habe und eine Lohnarbeit bei einer Firma jeden finanziellen Rahmen sprengt.
Das mit dem 90° gedrehtem Hüftservo ist ne gute Idee - nutzt vorhandenes Servogehäuse aus und spart zusätzlichen Material und Gewicht.
Die Befestigung sollte ähnlich möglich sein, wie angedeutet.
Das habe ich übrigens - allen Unkenrufen damals zum trotz - an dem Bioloid-Bausätzen zu schätzen gelernt. Ein fertigens System, welches viele (nicht alle) Möglichkeiten zur Kombination schnell und einfach bereitstellt. Teileweise reichte es schon sich 2-3 Dynamixels mit einigen Frames zusammen zu stecken und hatte eine funktionierende Ausgangsgrundlage - oder auch nicht
Einige Frames habe ich verändert um Nachteile lokal zu entfernen ...oder das Lochmaß auf Aluwinkel "kopiert" und eingebaut.
Geändert von HeXPloreR (12.03.2013 um 10:20 Uhr)
 Berechtigungen
Berechtigungen

Lesezeichen