




 Zitieren
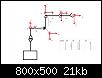
Zitierenanbei ein bild der koordinatensysteme die ich gemacht habe, vielleicht kann mir ja jemand sagen ob das schonmal richtig und sinnvoll ist....

 Werbung
Werbung

Hallo alle zusammen,
Da ich hier neu bin weiß ich nicht genau ob es das richtige Forum ist, falls nicht dann bitte ich um Verschiebung ins richtige.
Zu meiner Problematik:
ich habe einen 6achs Roboter (knickarmroboter) welcher in catia simuliert wird, sprich die Winkel der einzelnen gelenke können nach Wunsch eingestellt werden.
Der Roboter ist auf einer Ebene verschraubt und soll mit dem TCP einzelne Punkte auf der Ebene anfahren.
Zur Vereinfachung sollen nur gelenke des Roboters verwendet werden, die anderen beiden sollen "steif" bleiben.
Bekannt sind die Punkte auf der Ebene in x,y,z koordinaten (wobei die z-Koordinate ja 0 bleiben müsste, da es nur in einer eben ist).
ich möchte nun zu den Punkten die dazugehörigen Winkel der einzelnen gelenke berechnen. Erst von Hand und später mit einem Rechenprogramm wie Matlab oä.
meine Frage ist nun die Vorgehensweise, da ich kompletter Neuling auf dem Gebiet bin.
folgendes bin ich grade dabei zu machen:
-Koordinatensystem legen
-Denavit-Hartenberg Parameter aufschreiben
Nun bräuchte ich ein paar Tipps wie die weitere Vorgehensweise wäre!
Gut wäre auch ein Beispiel einer solchen Berechnung anhand eines Beispiels, am besten mit zahlen.
Danke schon mal für die Hilfe
Gruß Heisenberg
anbei ein bild der koordinatensysteme die ich gemacht habe, vielleicht kann mir ja jemand sagen ob das schonmal richtig und sinnvoll ist....
ist das hier generell das falsche forum?
jemand ne ahnung wo mir da geholfen wird?
Hallo Heisenberg!
Vom Mitlesen diverser Hexapod-Threads habe ich den Begriff der Inversen Kinematik im Gedächtnis, also die Beschreibung von Punkten im Raum durch Strecken und Winkel (also deinen Knickarmroboter). Ich kann leider nichts dazu beitragen, will dich aber nicht im Regen stehenlassen mit deiner Anfrage. Vielleicht sind aber die Kenner der Materie gerade urlaubsbedingt offline ?
Gruß
Christian.
ja inverse kinematik stimmt schon, aber soweit bin ich leider noch nich...

Also wie ich das sehe, müsste x4 horizontal liegen, da die x-Achse entlang des gemeinsamen Lots der aktuellen z-Achse und der vorherigen z-Achse verläuft. Heißt also bei parallelen z-Achsen, dass die x-Achse in ihrer Richtung bestimmt ist. Jetzt müsstst du die DH-Parameter berechnen, also a_i, alpha_i, d_i und delta_i (Bezeichnung wechselt je nach Literatur). d_i und delta_i wären dabei konstruktiv festgelegte Parameter, bei a_i und alpha_i ist meist auch einer festgelegt und der andere dann die Gelenkvariable, a_i zB. für Schubgelenke oder alpha_i für Drehgelenke.
Um diese Parameter zu berechnengeht man vom vorherigen Koordinatensystem K_i-1 aus und bewegt es nach und nach in die Position des aktuellen Koordinatensystems. Vorgehensweise ist dabei so:
-erst K_i-1 um die z_i-1 Achse drehen, bis beide x-Achsen übereinanderliegen, der Winkel ist alpha_i
-dann K_i-1 entlang der z_i-1 Achse auf die Höhe von K_i bewegen, so erhält man a_i
-dann K_i-1 um die x-Achse (also die neue x-Achse) drehen, bis die z-Achsen übereinanderliegen, das ist der Winkel delta_i
-zuletzt K_i-1 entlang der neuen x-Achse bewegen, sodass die Koordinatensysteme 1:1 ineinanderliegen, der Wert ist dann d_i
Für die Rückwärtstransformation werden allerdings häufig analytische Verfahren verwendet, ich hab mir ein Buch "Steuern und Regeln von Industrierobotern" geholt und muss sagen, dass es auf jeden Fall weiterhilft. Da steht auch die komplette Vorgehensweise für die Berechnung der Rückwärtstransformation für 6-Achs Knickarmroboter mit Zentralhand drin.
Übrigens braucht man nur 3 Gelenke für die Aufgabe, das Letzte lässt sich über Stabkinematik derart koppeln, dass es in der gewünschten Orientierung bleibt, siehe zB. bei Palettierrobotern.


DAS klingt ziemlich nach Hausaufgabe. Der Lerneffekt sinkt mit der Anzahl der beteiligten Lösungshelfer.Zitat von Heisenberg
Meine Erfahrungen darin sind etwas betagt. Aber sooo viele Koordinatensysteme - whow. Na ja, sieht halt für den Unbefangenen ziemlich bedeutend aus. Nur: Cartesius über Cartesius über Cartesius - sozusagen Cartesius hoch n . . . da schaudert mich schon das Hinschreiben.
Ich würde ein kartesisches Koordinatensystem anlegen - zweckmässigerweise irgendwie mit der Grundlage verbunden = bodenfest. Dadurch hätte die Position des TCP den eindeutigen Bezug, der auch praxisnah und gut nutzbar wäre. Danach rechne ich von der Befestigung weg, also vom bodennächsten Gelenk die Lage der einzelnen Gelenke, sinnvollerweise ebenfalls noch im kartesischen Gesamtsystem. Jetzt wird daraus die Gelenkstellung in Polarkoordinaten für jedes einzelne Gelenk gerechnet, weil der relative Winkel ja genau das ist, was die Gelenkregelung verdauen muss. Ausserdem sollten die Gelenke nicht über ihre Gültigkeitsgrenzen hinaus gesteuert werden - das bringt eigentlich NIE etwas *ggg*. Ach so - und schulbuchmässige Transformationsmatritzen gibts wohl wie Sand am Meer.
Wie gesagt - ist bei mir lange her, müsste ich mich erst gründlich zurückdenken. Aber anders sähe ich erstmal wenig Erfolg.
Für den August wäre das wohl ein Problem gewesen. Für WK bestimmt schon viel weniger. Aber wenn Du die Gelenklösungen mit einem satten Maß quantenphysikalischer Unschärfe rechnest - dann brauchste eh nix zu rechnen.
Ciao sagt der JoeamBerg
Heisenberg,
Du hast Dir ein ziemlich schwieriges Thema ausgesucht, das Du nur bewältigen können wirst, wenn Du in Mathe (speziell in Vektoralgebra) wirklich fit bist. Bei Roboternetz wirst Du keine Hilfe bekommen - hier gilt alles, was mit Mathe zu tun hat, als ausgesprochen uncool. Mein Rat: Suche im Web nach den Stichworten "Kinematik" und "Quaternion", da findest Du jede Menge Literatur zu Deinem Thema.
Ciao,
mare_crisium
Also erstmal danke an alle für die Antworten!
ich bin jetzt einen kleinen Schritt weiter:
die kordinatensysteme müssten jetzt soweit stimmen und die denavit-hartenberg parameter hab ich auch ((bin mir aber nich sicher ob richtig), siehe bild).
Mein problem ist jetzt die weitere vorgehensweise:
Wenn ich jetzt die denavit hartenberg matrizen aufstelle, habe ich ja am ende verschiedene matrizen, und ich weiß aber nur wo mein greifer hin soll (x,y,z).
ich weiß aber nicht wie ich jetzt mit den parametern x,y,z und den matrizen auf die winkel für meine gelenke kommen soll...
danke und gruß
meinst du dieses Buch:
http://www.amazon.de/Industrierobote...0393062&sr=1-1
das hab ich schon da, aber es hilft mir nicht wirklich weiter
edit:
ich hab hier was gefunden (ab S.14) das ist doch in etwa das was ich haben will oder nicht?
http://www.rob.uni-luebeck.de/Lehre/...L5_1_vers1.pdf
versteht einer die Auflösung nach den winkeln am ende?
Geändert von Heisenberg (11.07.2011 um 16:24 Uhr)
 Berechtigungen
Berechtigungen

Lesezeichen