




 Zitieren
ZitierenToller Roboter!
Sieht für den ersten selbst gebauten auch schon recht kompliziert aus.
In was hast du ihn programmiert?

 Werbung
Werbung

Hallo RN-Community.
TaaTaaa! Hier ist er, mein erster Selbstfahrer:
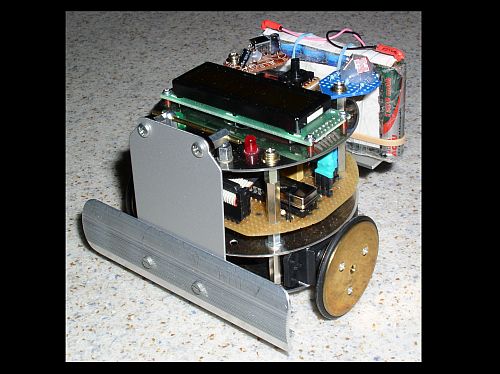
Er hört auf den Namen Robidoff. Naja, hören kann er nicht wirklich. Eigentlich ist er doof wie Odie: rennt konsequent erstmal gegen jede Wand/Tischbein, um dann zu wenden oder läßt sich wahlweise auch mit einer Taschenlampe Gassi führen. Damit dürfte er IQ-mäßig jede Amöbe glatt unterbieten.
Aber es hat Spaß gemacht, ihn über alle Fallstricke und Dämlichkeiten der Programmerstellung hinweg so 'weit' zu bringen! Er wird -so Gott will- sicher nicht mein letzter Bot bleiben.
Geändert von RoboHolIC (06.05.2011 um 21:55 Uhr) Grund: Ein griffigerer Threadtitel. Bitte nicht ärgern, wenn Du diesen Thread schon einmal gelesen hast.

Toller Roboter!
Sieht für den ersten selbst gebauten auch schon recht kompliziert aus.
In was hast du ihn programmiert?
Danke, avrrobot!
Naja, am Anfang stand die Idee, daß ein Stapelaufbau aus festen Platten einer 3,5"-Festplatte ein gutes Finish geben würde, damit mein "Kind" auch hübsch daherkommt. Dann sind immer mehr Komponenten über die gedachte Karosserieform hinausgequollen, sodaß er jetzt überbordend kompliziert aussieht.
Den Controller, einen PIC16, habe ich in Assembler programmiert.

Hey gratulation zu deinem ersten Bot!!!!
Sieht echt super aus und eine Taschenlampe verfolgen ist garnichtmal so einfach für den ersten Robo!
Gefällt mir!
respekt! Vielleicht bekomme ich sowas auch irgendwann mal hin
Nur nicht den Mut sinken lassen !!!
Rom wurde nicht an einem Tag erbaut - und Robidoff nicht in einem ... (hüstel, ähm, das verbietet mir jetzt mein Reststolz).
So ein Projekt darf auch einfach wachsen - mit jeder mechanischen Sackgasse, mit jedem gelösten Knoten in der Software.

@RoboHolIC sehr schöner Bot. Glückwunsch.
Wie hast du die Kollisionserkennung realisiert? Drückt die Stoßstange auf einen Mikroschalter?
Ich überlege gerade, wie ich meinen WR1 das erste grobe Fühlen beibringen soll.
Ja, genau, von der Stoßstange wird ein ganz schlichter Microschalter betätigt.
Ich hatte damals Glück beim Griff in die Materialkiste; die erforderliche Schaltkraft ist
- a) genügend klein für die eher schwache Bodenhaftung des Bots und
- b) (fast immer) ausreichend groß, um der Schwungmasse der Stoßstange standzuhalten - eine Teppichkante löst da auch schon mal ein falsches Signal aus.
Funktionssicherer wäre wohl ein leichtgängiges massearmes Sensorprinzip, z.B.
- ein luftdicht geschlossener "Airbag" mit angekoppeltem Drucksensor
- ein"schwebender Bumper" mit g-Sensor zur Erkennung der <edit: Kollisionskräfte = Quatsch) aufgrund der Kollision auftretenden Trägheitskräfte.
Oder noch eleganter die üblichen Verdächtigen: Ultraschall oder Infrarot. Erfahrungsgemäß scheinbar auch nicht ganz unproblematisch.
Geändert von RoboHolIC (14.02.2014 um 18:21 Uhr) Grund: Berichtigungen
An meinem Pro Bot 128 ist serienmässig Infrarot, ist aber recht einfach zu realisieren. Ich habe dann noch ein Ultraschall Sensor verbaut und muss sagen Ultraschall ist besser. Mit dem Ultraschall erkennt der Roboter auch ein Tischbein was mit dem Infrarot nicht der Fall ist.
@RoboHolIC: danke für die Hinweise zur Schaltkraft und Schwungmasse. Und schon wieder hast du mich glaub ich vor einer "mechanischen Sackgasse" bewahrt. Ich habe Mikroschalter mit Schalthebel vorgesehen (Pollin 420685) und die reagieren sehr leicht, also werde ich von vornherein eine zus. Federung vorsehen.
Hast du am Robidoff mit weiteren Sensoren (IR, Ultraschall o.a) experimentiert, oder willst du es noch tun?
@Croal: Danke für den Hinweis, ich werde die Doku des Pro Bot 128 studieren. Welchen Ultraschall Sensor hast du genommen?
Noch eine Frage zu dem Asuro-ähnlichen Fahrwerk, ich habe damit noch keine Erfahrung. Gleitet der Robidoff auch auf halben Tischtennisbällen wie der Pro Bot 128? Kommt er gut über Teppichkanten drüber?
 Berechtigungen
Berechtigungen


Lesezeichen