









 Zitieren
Zitieren@oratus sum :
Ich glaube jetzt habe ich das in Deinem Thread erst richtig verstanden.
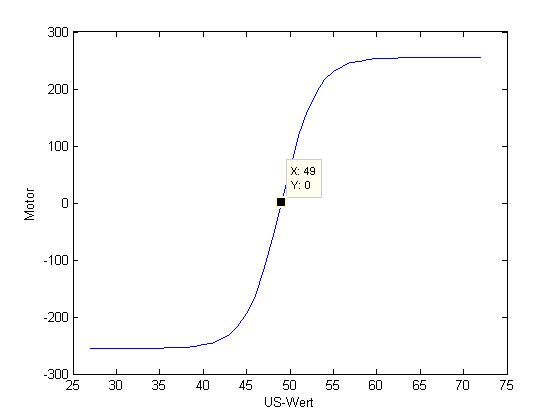
Du meinst, wenn der Sensor auf der rechten Seite ein Hindernis entdeckt, dann soll er direkt den PWM-Wert für beiden Ketten setzen. In diesem Fall linke Kette langsamer, rechte Kette schneller, damit er sich nach links dreht. Dadurch würde der Bot direkt reagieren und das sehr flüssig. Hindernisse auf der linken Seite, würden dann die rechte Kette langsamer und die linke schneller werden lassen. Das scheint mir ne klasse Idee zu sein!!!
Meinst Du das bei Dir mit der Fuzzy Logic?
Was Rabenauge mit den 10cm meint, ist bei mir genauso. 10cm entsprechen bei mir 2,7V. Was nahezu dem maximal Wert entspricht. Bei 10cm heisst es also Stop in jedem Fall und dann rückwärts. <10cm ist nicht detektierbar, das haste recht.




Lesezeichen