




 Zitieren
ZitierenDas Layout schaut nicht schlecht aus, jedoch kann man die Masse Leitung noch verbessern. Du solltest vom Masseanschluss direkt zu jedem Block.
Bei der positiven Schiene kannst du auch von der Kondensatorbank direkt zu jedem Block
MfG Hannes

 Werbung
Werbung


Deswegen dachte ich nun, dass ich bei den Kondensatoren ruhig eine Serienverteilung nehmen kann.Zitat von 021aet04


Oben links auf der Platine an den 2 Lötpunkten sollen die Servos angeschlossen werden.
Unten rechts gehe ich vom SBEC, der am Akku hängt, in die Kondensatoren rein.
Die Servos sitzen auf einem Shield für ein Arduino Mega.
Das Shield bekommt dann eine Sternschaltung.

Momentan klappt das nur für GND.
Für die + Leitung müssen wir uns noch etwas überlegen, wie wir dort ebenfalls eine Sternschaltung hinbekommen.
Hinweis:
Die kleinen Kondensatoren zum Entstören haben wir schon vor ein paar Jahren in die Servos eingelötet. 100uF und 100nF. Deswegen müssen die nicht nochmal aufs Board.
Edit:
Wir würden einfach schöne dicke Kabel und dicke Buchsen/Stecker nehmen um die + Leitung für die Servos im Stern zu schalten.
Das rote mit Paint gezeichnete sollen die Kabel darstellen
In den großen Kupferkreis auf der Linken Seite kommt dann die geregelte Spannung aus der KondensatorenBank an.
Unten ist dann GND zu finden.
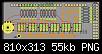
Hinweis: Die Leiterbahnen werden alle, bis auf die Servosognalleitungen, so dick wie möglich gefräst! Das stelle ich nur im Fräsprogramm ein und nicht direkt bei Fritzing
Geändert von JensK (30.01.2015 um 14:35 Uhr)

Das Layout schaut nicht schlecht aus, jedoch kann man die Masse Leitung noch verbessern. Du solltest vom Masseanschluss direkt zu jedem Block.
Bei der positiven Schiene kannst du auch von der Kondensatorbank direkt zu jedem Block
MfG Hannes
Das verstehe ich nicht ganz... Bei der positiven Schiene gehen wir doch so direkt zu jedem Block. Die Platinen sollen später gestackt werden, weshalb da noch die eine Steckverbindung zwischen ist und die rot hingepfuschten kabel sollen fest auf der Platine verlötet werden. Wie meinst du das bei der GND-Schiene? Jeder Block mit eigener Leitung ist platztechnisch etwas schwierig.
mfg

Macht es eigentlich wirklich so viel aus, wenn man das kurze Stück zwischen den Servoverbindern nicht sternförmig verkabelt? Da könnte man doch ganz einfach in einer Linie ne dicke Bahn unter den Steckverbindern langlegen und da dann später noch Kupferdraht drüberlöten. Die paar Milliohm, die da zusammenkommen, werden doch nicht so viel kaputt machen, oder?
AI - Artificial Idiocy

Hi!
Die Platine ist doch hinreichend simpel als dass man sie noch gut auf Lochraster aufbauen könnte. Das hätte den Vorteil, dass Du (versilberten) Kuperdraht mit großem Querschnitt zum Verlegen der Stromversorgung verwenden könntest. Wenn es eine geätzte/gefräste Platine sein soll: spricht etwas dagegen, eine Fläche für Plus auf der einen, und auf der anderen Platinenseite ein Fläche für Masse zu verlegen? Ansonsten könnte man durchaus auch darüber nachdenken, die Versorgung der Servos zu Splitten zB in 9 Servos + 9 Servos (entsprechend zwei Körperhälften des Hexas), sodass also jeweils 9 Servos einen eigenen Akku und Schaltregler bekommen. Bei den Abschätzungen für meinen (bis heute kaum halbfertigen) Hexa bin ich auch eher in die Größenordnung der weiter oben von Klebwax genannten Werte gekommen.
Gruß
Malte
Moin Malthy,
Bei der gefrästen Version habe ich die Möglichkeit die Dicke der Leiterbahnen zu bestimmen und kann somit die + und - Leitungen so dick wie möglich Fräsen lassen. Zusätzlich kann man noch, falls nötig, Kupferdraht verlöten.
Bei der Schichtdicke und 25A Belastbarkeit, würde aber eine 6mm breite Kupferschicht wohl ausreichend sein.
2 Platinen könnte man auch anfertigen. HannoHupmann hat ab der geregelten Stromversorgung sogar pro Bein eine Platine.
Ich denke wir probieren das mal mit einer Platine, da es bei uns nicht sehr viel Platz im Hexa gibt.
Elektroteile sind ja zum Glück erschwinglich. Wir liegen vermutlich bei 5-10€ für beide Platinen (ohne SBEC, ICs und DevBoards)
Nochmal eine Frage zu dem GND.
Sollten wir das Logik GND mit dem Servo GND verbinden? Also so auf dem ServoBoard:

Bei dem Bild haben wir nun das GND von der externen Servoversorgung mit dem Logik GND vom Arduino verbunden.
Macht das Sinn?
Hi,
Bei welcher Schichtdicke? Man kann den Leiterbahnwiderstand auch ordentlich auszurechnen, viele PCB-CAD Programme geben auch grobe Hinweise zur Strombelastbarkeit. Für 35 µm Kupfer und 6 mm Leiterbahnbreite gibt zB Target eine Strombelastbarkeit von 8 A an (was nur ein grober Richtwert sein kann - das aber eben zumindest).Bei der Schichtdicke und 25A Belastbarkeit, würde aber eine 6mm breite Kupferschicht wohl ausreichend sein.
GND der Logik und GND vom Servo müssen verbunden sein, der Servo soll ja die PWM-Signale von der Logik "vestehen".
Gruß
Malte
Moin,
ich hatte irgendwo Werte zwischen 8 und 14 A gelesen. Kommt dann auch noch auf die Temperatur drauf an.
Bei 35µm Kupfer Schicht habe ich folgende Werte gefunden:
Leiterbahnbreite 10° 20° 30° 40° 60°
6,00 mm 7,5A 11,0A 14,0A 16,0A 18,0A
Quelle: http://www.pcb-pool.com/download/spe...astbarkeit.pdf
Schaun wir mal ob das reicht. Zur Not können wir ja Kupferdraht auf die Platine auflöten.
Lg
jens
Es geht weiter.
Platinen fräsen:


Bohrungen per Standbohrmaschine aufbohren: (Für die Kabel + und GND)

Und nun bestücken

Kondensatoren....

Jetzt müssen noch die Kabel in die vergrößerten Löcher gelötet werden und SBEC und Stiftleisten gelötet werden.
Momentan warten wir noch auf den SBEC und die Stifleisten, die frisch aus Hongkong angeflogen kommen... Das dauert aber sicherlich noch ne ganze Zeit.
Die Zeit werde ich mir mit Servos entstören vertreiben...

Elkos und Kelkos in die Servos reinlöten. Schöne Schweinerei :P
Wer auf CNC-***** steht: (2 kleine Videos vom Fräsvorgang)
[Gravieren]
[Bohren]
Geändert von JensK (12.02.2015 um 11:06 Uhr)
 Berechtigungen
Berechtigungen

Lesezeichen