-

-
Hallo,
ich kann jetzt nicht nachvollziehen ob deine Rechnung richtig ist aber das kann meiner Meinung nach trotzdem nicht die Ursache sein.
Wenn nämlich die Änderung des Empfängersignals um 1 eine Winkeländerung von 3.6° zur Folge hätte würde sich das Servo ja auch auf gewollte Änderungen des Signals (Knüppelbewegung) in 3.6° Schritten bewegen. Das ist doch wohl nicht der Fall oder?
gruß,
kounst
ps: ich glaub fpv heißt first person view..
-
Erfahrener Benutzer
Begeisterter Techniker

Also ich kann mir das sehr gut vorstellen mit den 3,6°. Wenn ich den Code richtig verstehe wird die Stick-Position in -37/+37 umgesetzt. Also eine Auflösung von 74 Schritten. Bei mir schwanken die Empfängerwerte auch um 1 Punkt. Mir ist auch aufgefallen das mein Servo auch etwas am zappel ist. Aber nicht so stark.
Mfg
Matthias
-
Erfahrener Benutzer
Robotik Einstein
Ich selbe fliege ja nicht lese diesen Thread aber durchaus interessiert mit. Aus einem total andern Bereich, die BZ Einstellung eines Diabetikers wo sehr sehr viele Parameter Einfluss haben, ist mir aber bekannt das es keinen Sinn macht gleichzeitig an verschiedenen Baustellen zu "Drehen". Das erschwert b.z.w. macht eine Zuordnung quasi unmöglich. Auch zu schnelles Reagieren/ändern/probieren ist kontraproduktiv zu werten, Mit etwas "Ruhe" im System werden Störungen besser ausgewertet außerdem hält das den Kopf frei für wesentliches.
Viel Glück bei der Suche, ich bin gespannt woran es letztendlich festgemacht werden kann.
Gruß Richard
-
Erfahrener Benutzer
Begeisterter Techniker
@Nils
Ich hab mir dein Video nochmal genau angeschaut. Dein "Grundrauschen" auf der Servostrippe ist gewaltig. Das sind in der Spitze fast 100mV! Überprüfe nocheinmal die Lötstellen vom Servostecker. Hast du Kältespray oder sowas?? Damit könntest du Haarrisse in den Leiterbahnen finden.
Mein "Rauschen" sieht so aus.
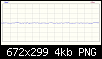
Mein Klumpen kommt zwar nicht an deine 50ns Zeitbasis ran aber man kann trotzdem sehen das, dass Rauschen nicht so stark ausgeprägt ist.
Mfg
Matthias
PS: Hab jetzt Bluetooth Module da, nur noch Willas Protokoll entschlüsseln 
-
Erfahrener Benutzer
Fleißiges Mitglied
Hi Nils,
das Rauschen auf der Versorgungspannung finde ich auch etwas viel. Ich bin der Meinung , das das Rauschen auf der Versorgungspannung nicht das Zucken des Servos verursacht sollte. Hast du schon mal eine andere Last an Stelle des Servos angeschlossen z. B. kleine Lampe als Last?
Bleibt die Versorgungspannung stabil?
Was passiert wen du ein Kondensator sagen wir mal ca. 100 nF (was du gerade hast 50nF bis 300nF) über Plus und Minus machst. Werden die Störungen weniger? Ansonsten wie schon gesagt Lötstellen und Leiterplatte anschauen. Wenn du kein Kältespray hast, pack die Platine in einen Gefrierbeutel mit so wenig wie möglicher Luft drin für 10 min in den Tiefkühler. Vieleicht kann man so schon Unterschiede ausmachen.
Aber du könntest auch die Platine gegen eine helle Lampe halten, dabei dir die Leiterzüge anschauen. Und dann mit einer Lupe müssten auch so Fehler zu finden sein.Ist die Leiterplatte selbst hergestellt oder industriell? Es gib noch die Möglichkeit die betreffenden Leiterzüge zu verzinnen um kleine Risse zu schließen.
Hast die mögliche Ursache Programm schon 100 % ausschließen können?
Grüße Sven
-
Erfahrener Benutzer
Roboter-Spezialist

Hallo,
die Platine hab ich bei www.platinenbelichter.de herstellen lassen. Kann nicht einer der Elkos wieder kaputt sein?
Ich werde morgen mal eure Tipps ausprobieren.
Da ich wieder Willa's Originalsoftware mit Originalparametern drauf habe, schließe ich Software aus - die hat ja vorher auch funktioniert.
Ich habe heute noch einige MEssungen mit dem Oszi gemacht, ich stelle die Ergebnisse morgen mal rein.
Gruß
Nils
-
Erfahrener Benutzer
Fleißiges Mitglied
Hi,
ich habe mein Problem heute finden können, warum mir beim schnellen links rechts schwenken nach einer Weile der rechte Motor ausging.
Und somit mein Tricopter runtergekommen ist. Nach langem Suchen und Probieren habe ich gefunden, das der rechte Motor einfach nicht genug Leistung entwickelt gegenüber den anderen Motoren. Ich verwände die ROXXY BL OUTRUNNER 2827-34 Motoren. Ich habe den Motor auseinander genommen, und mir sind die viel zu straff verdrillten Drähte aufgefallen. Wo drei Drähte gerissen waren also nicht alle Spulen erhielten Strom. Nach einer längeren fummeligen Aktion konnte ich den Motor flicken. Und nun macht der Tricopter auch wieder seine Runden. Habe zur Sicherheit noch ein neuen Motor bestellt.
Welche Motoren könnt Ihr mir noch Empfehlen?
Grüße Sven
-
Erfahrener Benutzer
Roboter-Spezialist
Hi,
meine Platine macht beim "Durchleuchten" einen heilen Eindruck. Keine defekten Leiterbahnen zu erkennen, inwiefern hilft mir denn Kälte beim Finden von kalten Lötstellen?
Langsam habe iche cht keine Lust mehr, mir viel gestern noch ein den Lautsprecher runter zu bauen, aber das hat auch nichts gebracht  .
.
Ich hab noch einige andere Messungen durchgeführt dazu später mehr.
@yak: DAs ist aber mal ein ungewöhnlich Gehler, aber hattest Du keine Tauschmotoren? Dann hättest Du das schneller gefunden. Ich fliege zu Zeit nur billige Motoren, wenn ichd ann Fliegen kann kaufge ich mir Roxxies. DeHarry erwähnte mehrmals schon die Dymond Motoren, die sind wohl ähnlich teuer und die Qualität soll auch sehr gut sein.
Nils
-
Erfahrener Benutzer
Begeisterter Techniker
@Nils
Kälte bewirkt das sich die Leiterbahnen etwas zusammen ziehen. Kalte Lötstellen oder feine Haarrisse die bei normaler Temperatur vieleicht noch leitend waren, kann man dann besser finden weil sie evtl. bei Kälte nichtmehr leiten. MfgMatthias
-
Moderator
Robotik Visionär

Hallo
Ein paar Gedanken von einem Laien:
timer1 = 62535 + 43
Das scheint mir nur die halbe Wahrheit zu sein, denn warum verschwindet dann hier das Zittern nicht komplett:
1. Kein Einfluss durch Funke: Parameter Yaw Stick Sensitivity = 0 (vorher 153): Heckservo zittert deutlich weniger
(Zitat von hier: https://www.roboternetz.de/community...l=1#post516059)
In dem oben gezeigten Codeausschnitt kommen als Störungsursache eigentlich nur drei Faktoren in betracht:
1.: Empf(yawchannel) - Wie wird das erzeugt?
2.: yaw_gyro_i - Ist das der genullte Yaw_gyro-Parameter?
3.: Der Schreibzugiff auf timer1 ist nicht atomar
Was passiert eigentlich, wenn du den timer1 mit einem festen Wert lädst? Variiert die Impulslänge dann auch noch?
Die 3,6° pro Schritt kann man wohl mit Yaw_sensitivity anpassen.
Der doppelte Aufruf von Getadc(1) (IMU?) in der Formel erscheint mir unsauber.
Gruß
mic
Bild hier
Atmels products are not intended, authorized, or warranted for use
as components in applications intended to support or sustain life!
Stichworte
 Berechtigungen
Berechtigungen
- Neue Themen erstellen: Nein
- Themen beantworten: Nein
- Anhänge hochladen: Nein
- Beiträge bearbeiten: Nein
-
Foren-Regeln








 Zitieren
Zitieren
Lesezeichen