







Moin moin,
ich habe als selbstgestellte Aufgabe für die Schule vorgenommen, einen Roboter zu bauen, der Einparken kann. Dazu hab ich einen Roboter mit ATMega16 bestückt und ihn mit 3 Sharp abstandssensoren ausgestattet. Um einer Straße folgen zu können, waren auch noch 2 Liniensensoren von Nöten.
Das ganze auf einer Plexiglasplatte montiert und so hab ich das Teil in 2 Wochen fertig bekommen. Ich muss zugeben die Software ist noch verbesserungswürdig, aber ich wollte euch das Teil schonmal vorstellen.
Hier einige Bilder:
Hier der Bot auf der "Straße"...

... hier von oben...

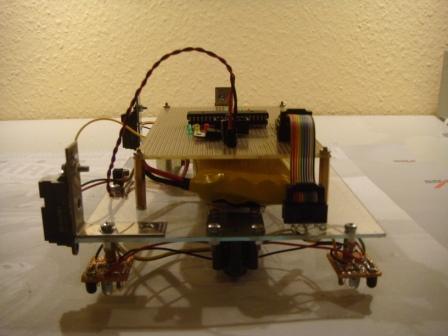
...hier von vorne...
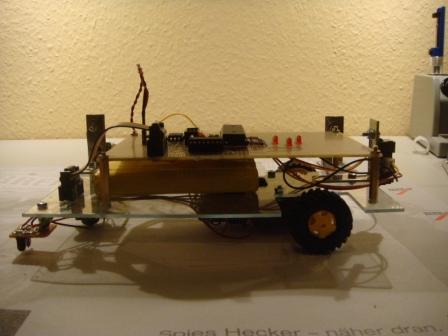
...hier von der Seite...
... und schließlich von unten.

Und hier hab ich noch ein Video von einem der ersten einparkversuche. Nicht perfekt, aber man kann schon das prinzip erkennen.
http://www.youtube.com/watch?v=0UUr2LP124g
mfg
Erik

 Zitieren
Zitieren

Lesezeichen