







 Zitieren
Zitieren
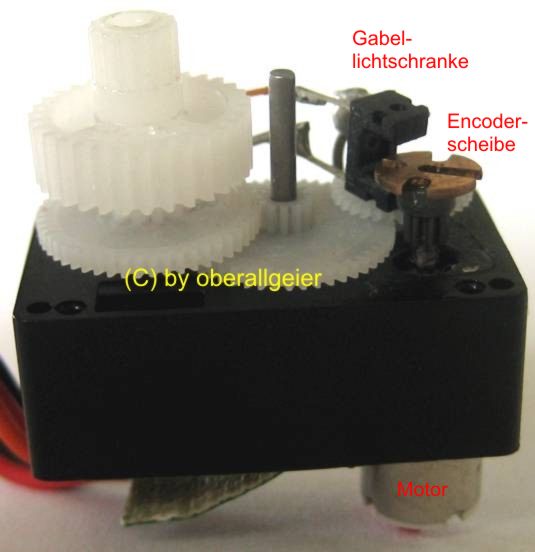
Endlich ein Bild des aktuellen Standes - sozusagen Version 2 des SOE-Getriebemotors (Servo Ohne Elektronik). Das Bild zeigt nicht den Getriebedeckel und die restliche Abdeckung des Motorraumes. Encoderscheibe von Klingon77. Drehzahlerfassung mit Gabellichtschranke GP1S096HCZ. Der Signalgang der Drehzahlerfassung ist z.B. hier gezeigt; er wird im Mega168 mit extINT0 und ~1 erfasst. Die vorletzte Getriebestufe ist ausgebaut, die letzte Stufe fehlt daher ebenfalls, die Abtriebswelle ist mit dem Abtriebsrad der dritten Stufe fest verbunden. Abtriebsdrehzahl im Leerlauf bei 5 V rund 510 Upm. Der Motor wird mit drei SMD-Kondensatoren 100 nF entstört - leider fehlt mir noch eine passende Induktivität (und ich weiß nicht, wie groß die sein sollte bei PWM-Frequenz 1,22 kHz). Ebenfalls im verbliebenen Restraum neben dem Motor die Vorschaltwiderstände für die Gabellichtschranken-LED und den Vorschaltwiderstand für den Phototransistor. Fazit: statt eines 3adrigen Flachbandkabels brauche ich fünf Adern *brrrrrrrrrr*. Als Räder nehme ich vorzugsweise O-Ring-bereifte Servoscheiben (aus dem Lieferumfang des Servos). Die aktuelle Betriebsdauer für zwei Motoren fast drei Stunden bei wechselnden, meist hohen Drehzahlen.
................
Dieser "getunte" Getriebemotor mit der Sonderausrüstung Drehzahlmessung lässt sich äusserst sparsam einsetzen, beispielsweise paarig mit zwei ø24mm-Rädern mit einem Radstand von 43 mm.




Lesezeichen