







 Zitieren
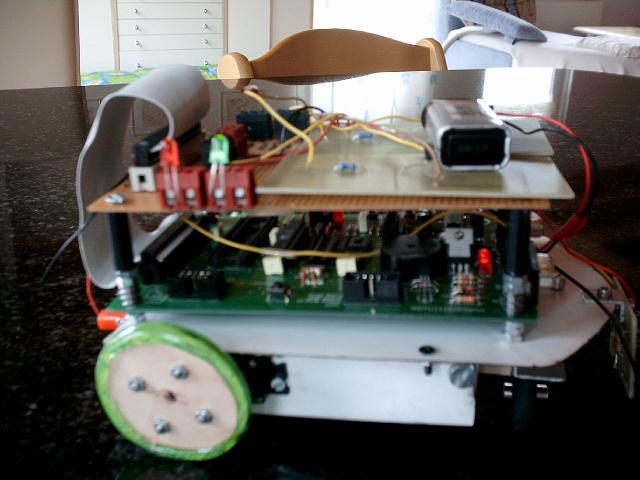
ZitierenSodala hab heute mal wieder ein Bischen weitergebaut. Hab mich heute um die Motoren gekümmert. Anfangs wusste ich nicht welche ich nehmen sollte, als ich dann jedoch heute Mittag meinen Elektrosegler geschrottet habe (der is wirklich nicht mehr zu retten.... Kommt ersma in den Keller) hab ich dzwei uralt-servos ausgebaut und mir gedacht: Wieso nicht das komplette Servo als Motor und Getriebeeinheit nutzen? Also hab ich mal das Servo aufgemacht, die Elektronik und das Potentiometer entfernt, die Anschläge abgefeilt und zu guter Letzt noch zwei Kabel an den Motor angelötet. Das Ergebnis ist erstaunlich: Nur 100mA Stromverbrauch je Motor bei 4,5V. Zudem extrem hoher Drehmoment. Einzigstes Manko: Die Geschwindigkeit... Nicht gerade berauschend aber durchaus ausreichend würde ich mal sagen. Werde die Servomotoren dann Morgen einbauen, dann gibts auch erste Bilder des Prototyp-Chassis mit eingebauten Motoren und Rädern (hab nämlich endlich wieder meine Digitalkamera gefunden).
Gruß, Felix





Lesezeichen